1 引 言
21世纪是城市地下空间开发利用的世纪,城市地下空间是城市经济发展不可缺少的空间资源,城市空间发展逐步由地面及上部空间向地下延伸,可以实现城市立体化,是提升城市功能的有效途径。但随着近几年城市轨道交通、大型市政管线、高层建筑地下室与桩基等大量地下工程的实施,中浅层地下空间利用逐渐趋于饱和,如何科学、合理、高效开发地下空间,特别是如何充分挖掘中浅层地下空间边角余量以及开发利用深层地下空间,是世界上众多大型城市亟待解决的问题。随着地下空间不断开发、地下管网系统逐渐完善,中心城区将产生大量开挖深度远超平面直径的深大竖井建设需求,然而在中心城区开挖建设大深度地下工程往往面临着建筑物密集、施工场地狭小、周围环境复杂等问题。同时,基坑开挖会引发地下水位降低和周围土层移动下沉,严重时甚至引发周围地层塌陷,给邻近建(构)筑物带来不利影响。传统明挖法因场地需求高、环境影响大等原因已难以满足当前城市地下空间竖井施工的高要求,其局限性愈发凸显,相比之下,沉井工法因整体稳定性好、场地需求低等优点更能适用于城市竖井建设,因而在地下工程施工中具有不可替代的竞争力以及广泛的应用前景。
2 沉井工法发展概况
2.1 传统沉井工法
传统沉井工法通过开挖刃脚下方土体,使竖井在自重作用下逐渐下沉。然而面对愈发复杂的城市建设环境,传统沉井工法仅依靠自重被动下沉,存在井体下沉缓慢,工期较长,面对不均匀土层时容易出现下沉偏斜,难以控制下沉姿态,对周边环境产生较大影响等问题。另外传统沉井工法采用粗放的施工模式,资源浪费严重,施工质量无法保证。上述因素均极大制约了该工法在中心城区地下空间建设开发中的应用,亟待相应技术革新以满足城市发展需求。图1为传统沉井工法施工图。

图1 传统沉井工法施工
2.2 压入式沉井工法
压入式沉井工法是在由锚桩、千斤顶组成的反力控制装置提供的主动下压力作用下,结合井内取土与侧壁减摩等减阻措施,使竖井结构通过自身重力、反力拉杆、减摩措施克服下沉阻力和地下水浮力,并以准静止受力平衡状态稳定下沉。因此,相比于传统沉井工法,压入式沉井工法对周边环境扰动更小。但对于深厚软弱的富水地层或含巨砾石的砂砾层,压入式沉井在较大下压力作用下可能存在突沉、超沉、倾斜等稳定控制问题。压入式沉井工法施工示意图如图2所示。
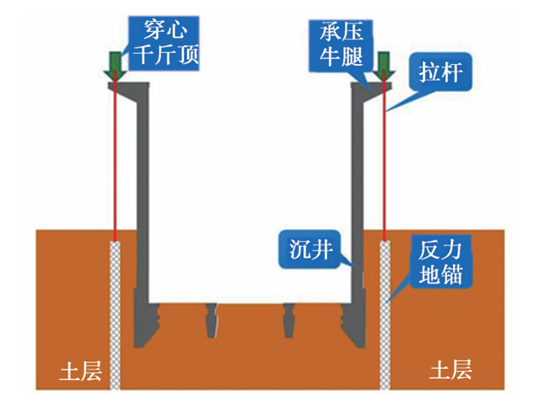
图2 压入式沉井工法施工示意
2.3 气压沉箱工法
气压沉箱工法通过在沉箱下部构筑底板形成一个气密性高的钢筋混凝土结构工作室,并借助气压自动调节装置向工作室注入压力与刃脚处地下水压力相等的压缩空气,使其在无水环境下挖土排土,箱体则在自重及上部荷载作用下下沉。由于工作室内的气压与地下水压力平衡,所以沉箱下沉过程无需对箱外高水头地下水及承压水进行降水降压处理,也不会出现坑底隆起、流砂和管涌现象。同时,工作室内的压缩空气类似气垫弹簧,可以有效控制箱体下沉速度,防止突沉、超沉。因此,气压沉箱工法对周边环境影响小,适用于对地下水控制要求高、土体变形敏感的地区。但气压沉箱工法存在工作室保压困难、施工设备复杂、整体工艺难度较高等问题,不利于广泛推广。图3为气压沉箱工法施工示意图。
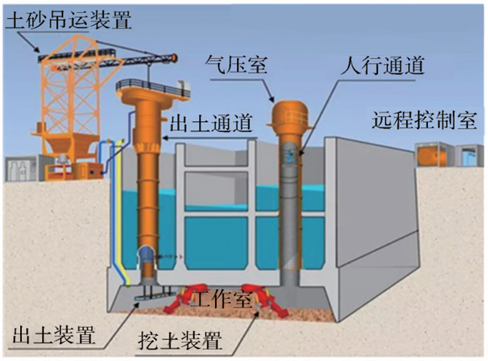
图3 气压沉箱工法施工示意
2.4 SOCS自动化沉井工法
为解决沉井工法在孤石、硬岩地层应用时挖掘效率低的问题,日本研发了SOCS自动化沉井工法。该工法由挖掘取土系统、下沉管理系统和主体结构组成。SOCS自动化沉井工法施工如图4所示。图4中,挖掘取土系统采用无人驾驶的自动化水下挖掘机挖掘沉井刃脚处土体,采用电动液压抓斗对沉井中央处土体进行挖掘取土。下沉管理系统基于设置在沉井主体上的沉降仪、倾斜仪、表面摩擦计、水压力计、刃脚反力计等测量设备监测的施工数据,操控千斤顶进行压入下沉,如图5所示。
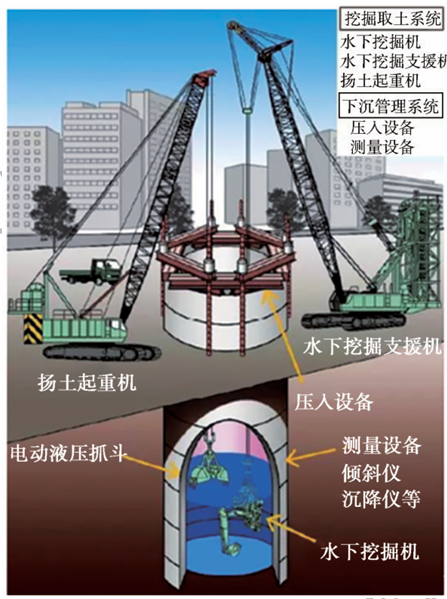
图4 SOCS自动化沉井工法施工示意
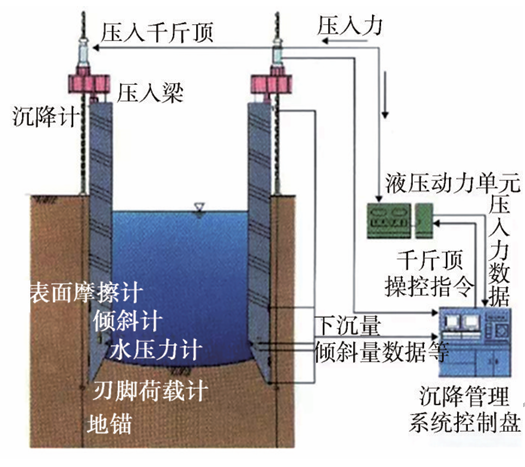
图5 SOCS自动化沉井工法下沉管理系统示意
2.5 VSM下沉式机械化竖井掘进工法
VSM下沉式机械化竖井掘进工法由竖井挖掘设备、泥水分离系统、沉降单元和主体结构组成,如图6所示。图6中,挖掘设备架设在井壁上随井筒一起下沉,通过铣挖刀头在竖井底部进行水下削挖土体。泥水分离系统借助铣筒底部的大功率吸浆泵,以液压方式将渣土泵送到地面上进行泥水分离。沉降单元通过设置的钢绞线与竖井刃脚环相连后拉住,使竖井结构在底部土体开挖完成后受控下沉。
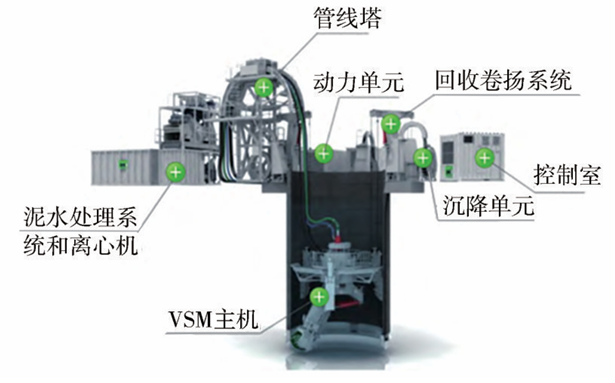
图6 VSM下沉式机械化竖井掘进工法施工示意
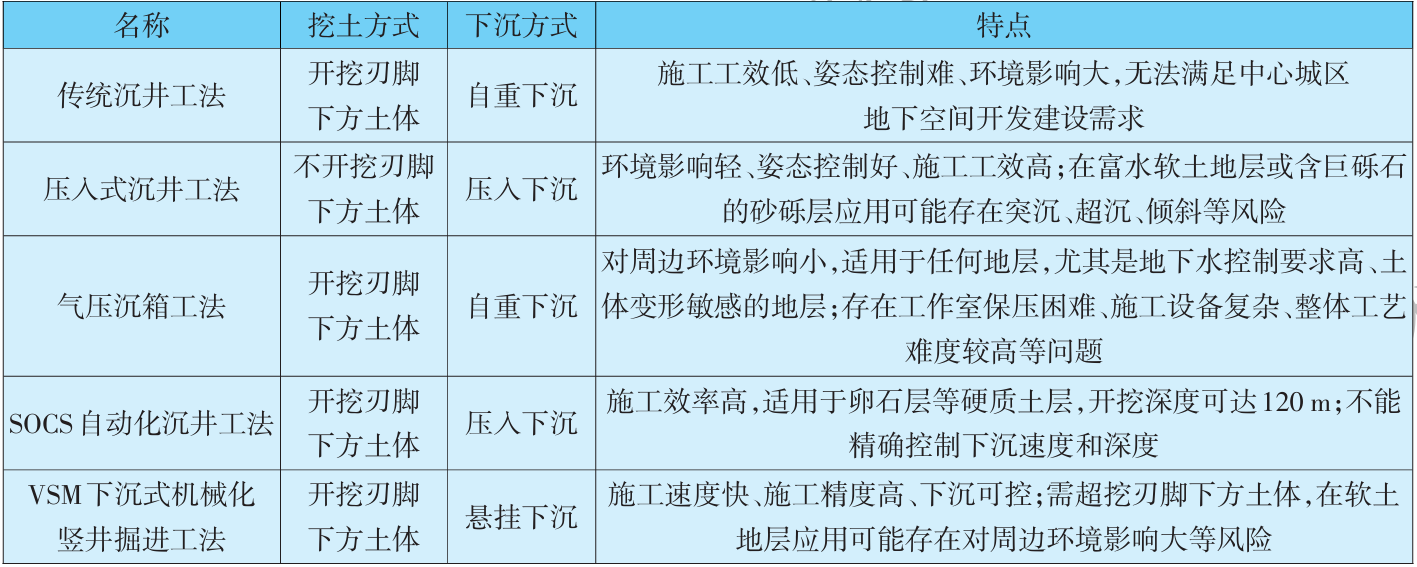
2.6 软土地层沉井工法比选
随着施工要求的提高和制造技术的提升,沉井工法呈自动化、智能化、机械化发展趋势,表1为沉井工法对比分析。由表1可知,SOCS自动化沉井工法和VSM下沉式机械化竖井掘进工法虽然可以大幅提高沉井的施工效率和施工精度,但应用在地层灵敏系数大、地基承载力弱、施工变形控制难的富水软土地层时,不能精确控制下沉速度和深度或者需要超挖刃脚下方土体,存在对周边地层影响大的风险。基于此,上海隧道工程有限公司结合SOCS自动化沉井工法“水下开挖、压入下沉”和VSM下沉式机械化竖井掘进工法“井身预制、悬挂下沉”的特点,借助顶管工艺“压注厚浆、孔口保压”技术,研发出一种断面自由的广适性主动控制型装配式机械化沉井工法。该工法采用不排水下沉方式,基于装配式拼装、主动控制下沉、机器人水下自动取土、同步压注减摩泥浆等技术,通过刃脚嵌入土层、水土压力内外平衡、下沉姿态精准控制,实现富水软土地层中心城区竖井结构微扰动下沉。
表1 沉井工法对比分析
3 主动控制型装配式沉井工法
主动控制型装配式沉井工法主要由五大系统组成,即预制井身系统、下压提拉双模系统、水下开挖系统、减摩注浆系统和智能控制系统,如图7所示。通过下压提拉双模系统稳定下压预制拼装井身、多自由度机械臂配合专用绞吸头水下全自动取土、同步压注触变-静凝式减摩泥浆降低井壁摩阻力,结合集开挖工况、下沉参数、井身姿态、环境监测于一体的可视化智能控制系统联动控制沉井施工,实现竖井结构精准高效下沉。
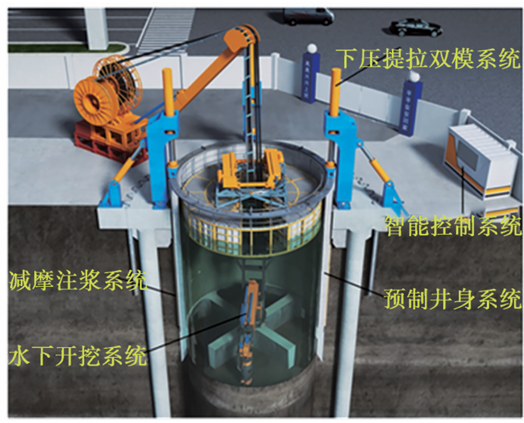
图7 主动控制型装配式沉井工法施工示意
3.1 预制井身系统
为降低开挖土体变形、提高施工效率、减少占地面积,竖井结构采用预制梯形管片正、倒置错缝拼装而成,如图8所示。管片间、管环间均采用高强螺栓连接。同时,为便于拼装定位以及提高竖井结构的抗剪能力,在管环纵向设置剪力销。通过“管片内弧面接缝安装三元乙丙橡胶止水带、外弧面接缝安装遇水膨胀橡胶”的双重止水措施,可有效保证预制装配式竖井结构的止水性能。
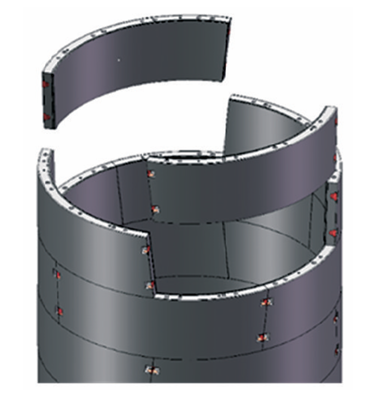
图8 预制井身系统
竖井结构底部设置了十字梁,可有效增大结构下沉过程与土体的接触面积,防止突沉。同时,设置十字梁还可以减小底板混凝土的厚度,降低工程造价。
3.2 提拉下压双模系统
为降低竖井下沉过程对周边环境的影响,竖井刃脚始终嵌入地层,因此下沉时需克服较大的下沉阻力;同时,为避免竖井下沉过程发生突沉、超沉,研发了提拉下压双模系统,如图9所示。该系统具有提拉下沉和下压下沉两种模式,当下沉阻力较小时,启用提拉下沉模式辅助预制井身系统通过自重下沉;当下沉阻力较大时,推进油缸提供助沉力下压预制井身,实现竖井下沉施工。上述系统的推进油缸可同步控制或单独控制,既能保证竖井整体下沉,又能通过调节推进油缸顶进行程确保竖井顶部保持水平,防止结构发生倾斜,进而精准控制竖井下沉姿态,实现结构垂直、稳定下沉。
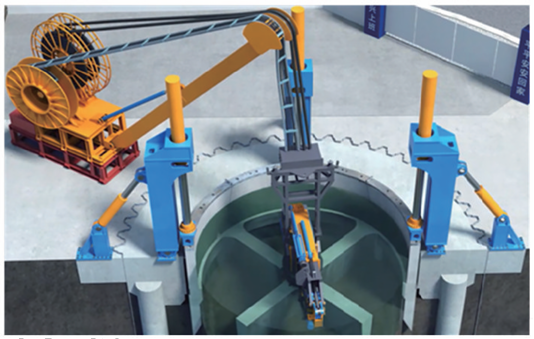
图9 提拉下压双模系统
3.3 水下开挖系统
水下开挖系统由多自由度机械臂配合专用绞吸头的水下挖土机器人组成,如图10所示。该水下机器人可根据地质条件和下沉情况动态调整土方开挖方式,实现水下全覆盖、全自动开挖。当开挖地层较软时,保留十字梁底土方,提高下沉阻力,增加下沉稳定性;当下沉困难时,掏挖十字梁底土方,降低土体反作用力,提高下沉速度。

图10 水下开挖系统
3.4 减摩注浆系统
减摩注浆系统是在竖井下沉过程通过向管节侧壁预留的泥浆护壁槽压注触变-静凝式减摩泥浆来减小竖井下沉时的侧壁摩阻力,如图11所示,泥浆配比见表2。同时,泥浆护壁槽孔口设置密封保压装置,实现保压注浆。这样既可以在降低竖井下沉摩阻力的同时保证周边地层稳定,又可以给井壁外侧提供围压力使预制井身系统结合更紧密,从而提高结构整体稳定性和密封止水性。
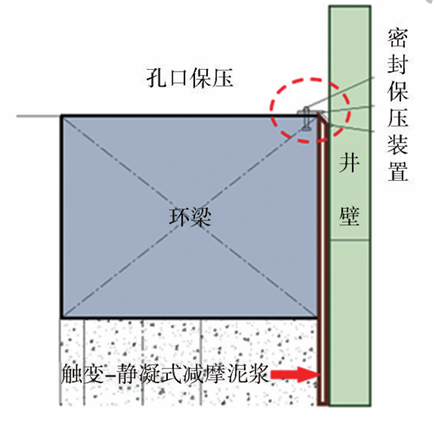
图11 减摩注浆系统
表2 泥浆配比

3.5 智能控制系统
主动控制型装配式机械化沉井工法的智能控制系统如图12所示。该系统采集挖掘工况、下沉参数、井身姿态、环境监测等信息,基于挖掘轨迹三维虚拟及轨迹自动规划技术实现“机+土+结构”全自动可视化开挖,结合竖井下沉监测、地层扰动响应联动提拉下压双模系统与减摩注浆系统实现下沉姿态动态调整和环境影响主动控制,确保竖井数字感知、智能控制、精准稳定下沉。

图12 智能控制系统
4 工程应用
上海轨道交通13号线西延伸工程季乐路站—运乐路站区间因逃生要求需在幸乐路设置竖向逃生井,逃生井内径8m,外径8.7m,总深度为31.125m。幸乐路逃生井周边建(构)筑物分布如图13所示,幸乐路逃生井剖面如图14所示,逃生井位于金丰路东侧、幸乐路北侧,施工场地有限,且竖井结构穿越土层质地较软、压缩性高,容易产生较大变形。为克服上述工程难点,该项目采用主动控制型装配式沉井工法进行施工。

图13 幸乐路逃生井周边建(构)筑物分布示意
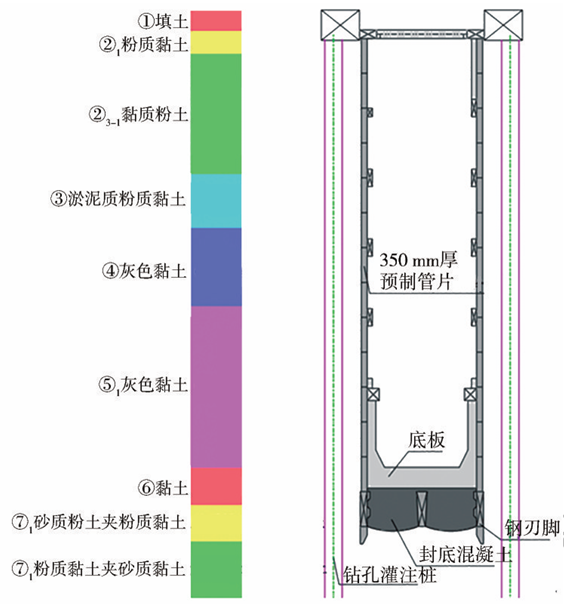
图14 幸乐路逃生井剖面
现场监测点位布置如图15所示,其中P11、P12、P13为土体深层水平位移监测点位,D11-1、D12-1、D13-1、D14-1为竖井周边地表沉降监测点位。图16为竖井施工结束时土体深层水平位移变化曲线,图17为竖井施工过程地表沉降变化曲线。由图16、图17可知,土体深层最大水平位移均值为5.10mm,地表最大沉降均值为4.81mm。应用表明,采用主动控制型装配式沉井工法可以精确控制下沉速度、深度和姿态,并且不需要对刃脚下方土体进行超挖,从而避免竖井结构产生突沉、超沉和下沉偏位等问题,具有环境影响小、施工占地小、社会干扰小等特点,适合应用在富水软土地层中心城区雨污水泵站、地下停车库、轨道交通中间风井、竖向逃生通道等竖井施工。
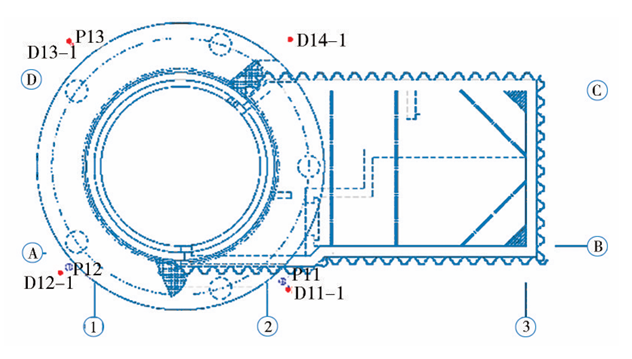
图15 监测点位布置
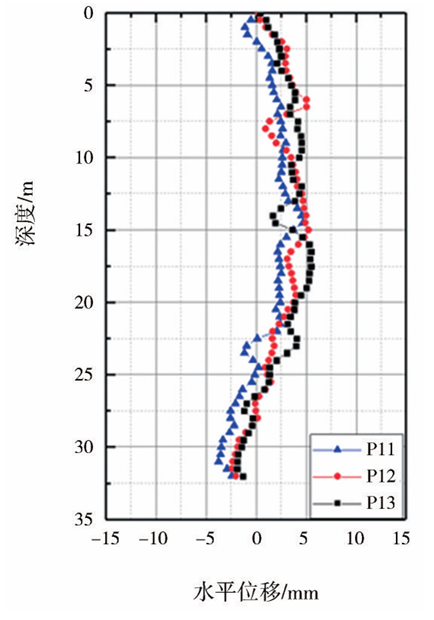
图16 竖井施工结束时土体深层水平位移变化曲线
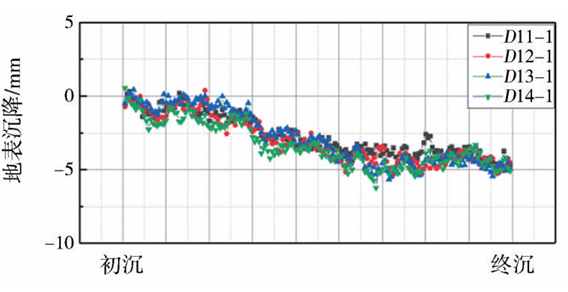
图17 竖井施工全过程地表沉降变化曲线
同时,主动控制型装配式沉井工法还可以通过十字梁与水下开挖系统的模数化组合,基于“机+土+结构”三维可视化全自动开挖技术,实现圆形断面、矩形断面、组合断面等任意断面深大竖井结构的精细化施工,拓展性强,可满足城市地下空间多样化建设需求,因此具有广泛应用前景和社会价值。图18为采用主动控制型装配式沉井工法开挖矩形、双圆形竖井示意图。
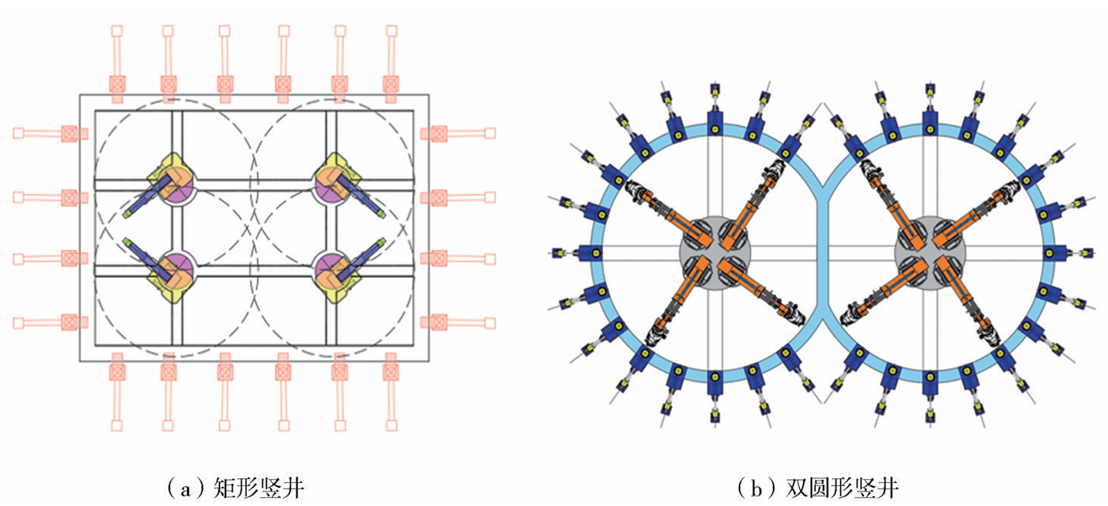
图18 采用主动控制型装配式沉井工法开挖矩形、双圆形竖井示意
5 结 论
为满足富水软土地层中心城区大量开挖深度远超平面直径的深大竖井建设需求,更好推动城市地下空间开发,研发了主动控制型装配式沉井工法。
通过本文的分析以及工程实践应用,可以得到以下结论:
(1)主动控制型装配式沉井工法结合了SOCS自动化沉井工法“水下开挖、压入下沉”和VSM下沉式机械化竖井掘进工法“井身预制、悬挂下沉”的特点,借助顶管工艺“压注厚浆、孔口保压”技术,通过下压提拉双模系统稳定下压预制拼装井身、多自由度机械臂配合专用绞吸头水下全自动取土、同步压注触变-静凝式减摩泥浆降低井壁摩阻力,结合集开挖工况、下沉参数、井身姿态、环境监测于一体的可视化智能控制系统联动控制沉井施工,实现竖井结构微扰动下沉。上海轨道交通13号线西延伸幸乐路逃生井工程采用上述工法进行施工,土体深层最大水平位移均值为5.10mm,地表最大沉降均值为4.81 mm,实施效果良好。
(2)主动控制型装配式沉井工法包含管片预制拼装、井底设十字梁、刃脚嵌入土层、水下自动取土、智能控制下沉、开挖装备模块化组合等关键工艺,具有环境影响小、施工占地小、社会干扰小、断面自由度高等优点,可推广应用于富水软土地层中心城区雨污水泵站、地下停车库、轨道交通中间风井、竖向逃生通道等竖井施工,具有广泛应用前景。
摘自《现代隧道技术》