1 引 言
隧道施工过程中,断面测量及分析、方量计算、平整度检测、净空分析、厚度分析等是施工质量和安全保障的重要过程控制指标。三维激光扫描技术作为一种突破性测绘手段,是真实全面体现工况并有效检测上述指标的理想方法,目前已广泛用于隧道爆破开挖、初期支护、二次衬砌、竣工检测、运维等多个环节。吴 勇等采用三维激光扫描进行盾构隧道病害监测;杨必胜等提出利用标靶、已知坐标的区段对点云数据三维坐标进行改正,在某些较难测量的危险区域具有明显的优势。
近年来,三维激光扫描硬件设备性能不断提升,专业软件应用技术不断深化,但隧道海量点云数据处理效率的难题却没有很好解决,现行检测流程中用高性能电脑,采用一种或多种软件对点云数据进行拼接、配准、过滤、去噪、分析等,才能得到最终的分析成果,现场问题无法立即识别与解决,极大影响了应用和推广效果。其核心原因是在隧道专业的背景框架下,缺乏对海量点云进行轻量化、智能化处理的高效算法体系及标准作业流程。为提高隧道三维激光扫描内业效率,张 豪等提出利用点云坐标转换方法可有效减小点云数据数量级,提高数据处理、运算及传输速度;张 帆提出隧道管片激光扫描数据自动处理的聚合算法,但不适用于有遮挡的矿山法隧道环境。本文提出一种隧道三维激光扫描测算一体化技术方案,建立一套点云自动过滤、降采样、地物分离、特征点提取、数据应用的算法体系及应用流程,首次将隧道扫描外业与内业工作结合,最大化发挥三维激光扫描硬件设备性能,实现现场即时扫描、即时分析并当场指导施工,极大提高作业和信息沟通效率。
2 隧道扫描测算一体化技术
隧道激光扫描应用的本质是获取隧道现场点云数据并进行计算分析,实现点云与设计(或其他点云)的比较,从而得到各种线、面、体的数据成果。
测算一体化技术采用先进软件工程与移动互联网理念,并针对隧道扫描点云特点对基础数学理论进行算法改良与优化,实现了隧道扫描应用信息化系统的轻量化与高效率。现场利用普通平板电脑即可快速完成设计信息录入、扫描数据采集、数据预处理、数据分析应用等工作,其工作流程如图1所示。
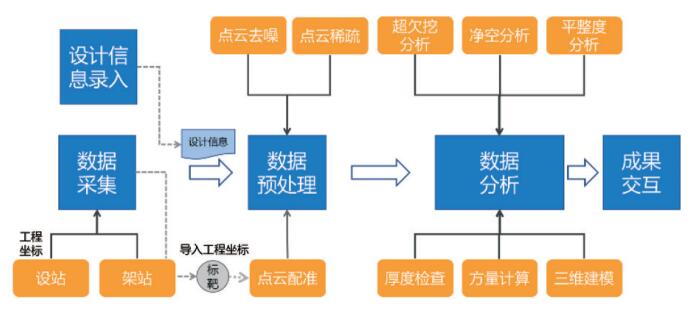
图1 隧道三维扫描应用流程
2.1 设计信息录入
隧道设计信息包括项目基础信息、平曲线(交点法或线元法)、竖曲线、断链以及不同围岩等级下的隧道各工序断面图等;并根据隧道里程和围岩对应信息,将各工序隧道断面轮廓图与线路里程进行关联,形成完整的隧道设计,在后续的计算中根据里程自动选择断面轮廓进行计算。
2.2 数据采集
(1)架站扫描。提前规划扫描区域,合理设置架站位置,尽量减少对扫描区域的遮挡。具有后方交汇功能的扫描设备可直接进行设站,并获得工程坐标系下的点云数据。其他设备则通过棱镜、靶球、靶纸等辅助装置的测量,间接进行扫描点云在工程坐标系下的配准。根据设备的不同,扫描的典型时长一般在2~30 min。
(2)原始点云数据获得。不同扫描设备提供了不同的原始点云导出方式,包括WiFi无线连接、有线连接、直接插拔读取SD卡等,上述方式均能够实现在现场立即获得国际通用格式(las、laz、pts等)的点云数据。
2.3 数据预处理
获取原始点云后,通过降采样实现点云轻量化,通过聚类加拟合自动过滤噪点实现隧道点云主体识别,并基于设计信息实现智能化拟合,完成点云数据自动预处理,可有效提升后续业务处理的效率。
为适应施工现场的人机交互环境,研发的数据后处理软件需适应搭载Windows系统的平板电脑配置环境,并实现如下预处理运算要点:
(1)点云配准及坐标转换。对于不具备设站能力的扫描设备,其每站扫描的点云都处于以自身站心为原点的坐标系中,多站扫描的数据需通过全站仪测量出的靶球、靶纸等特征点的测量坐标,转换到实际的工程坐标系,实现点云的整体配准(图2)。
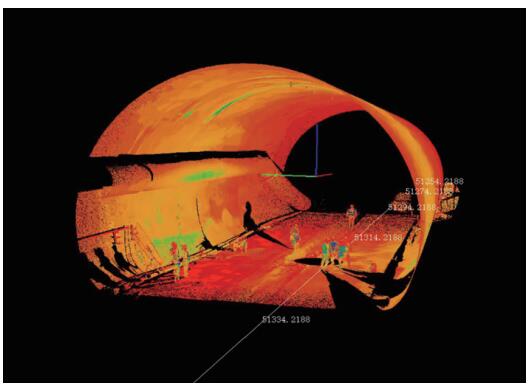
图2 隧道原始点云
(2)点云自动过滤。现场施工点云噪点可按与隧道壁的距离分为两类:第一类是偏离隧道壁较远的点,多为隧道内的施工人员和工程车辆等,其距离隧道壁的偏差相对于工程测量中常见的误差范围(预定义为厘米级误差)有数量级的差异,系统中进行了预设,并允许用户根据施工具体情况进行参数调整;第二类是离隧道壁较近的点,多为通风排水及供电管线等,这部分点因为与主体距离近且范围相对较小,通常容易与测量误差混淆(预定义为厘米级误差),不易区分。
对于第一类噪点,由于其一般与主体点云存在较大距离,且体外噪点的数量明显比主体点云要少很多,适用于 DBSCAN 聚类(Density-Based Spatial Clustering of Applications with Noise)方法识别(图3)。DBSCAN可以自适应地做聚类结果,对噪声不敏感,并且对任意形状的空间聚类都有较好的识别力。
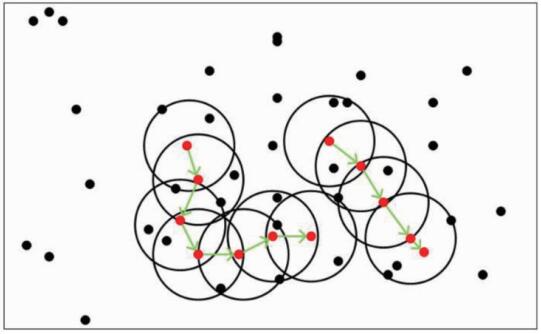
图3 聚类说明
对于第二类噪点,由于紧贴点云主体,聚类方法已不适用;经过理论分析与效果比对,发现通过最小二乘拟合与基于RANSAC的圆拟合相结合的方法有很好的效果。具体步骤为:
① 计算点云在隧道断面轮廓的投影,切分出和断面轮廓线元对应的点云数据,并按断面线元分段拟合圆弧。
② 通过最小二乘拟合出圆弧,由圆的标准方程可得:

③ 在设定好的阈值范围中区分出局内点和局外点,并求得局内数据点。
④ 拟合过程迭代,找到置信度最高的模型。最终过滤成果如图4、图5所示。
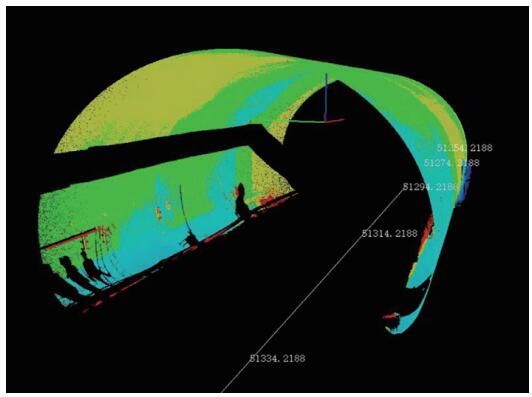
图4 DBSCAN聚类过滤
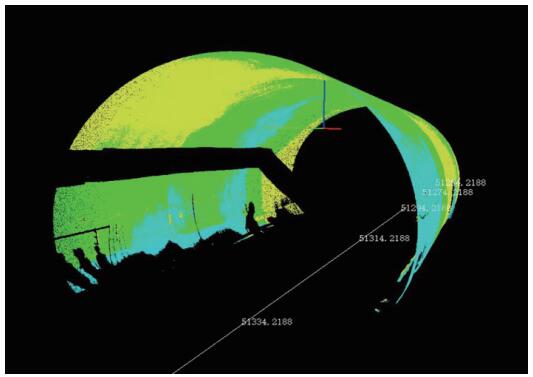
图5 拟合过滤
(3)点云降采样。对于隧道施工环境,并不是点云数据密度越高越好,而应该在满足数据精度要求的前提下,尽可能减少数据量,从而提高软件系统的处理效率。因此,对点云进行降采样是十分必要的。常用的降采样方式以及特点对比如表1所示。
表1 降采样方式对比
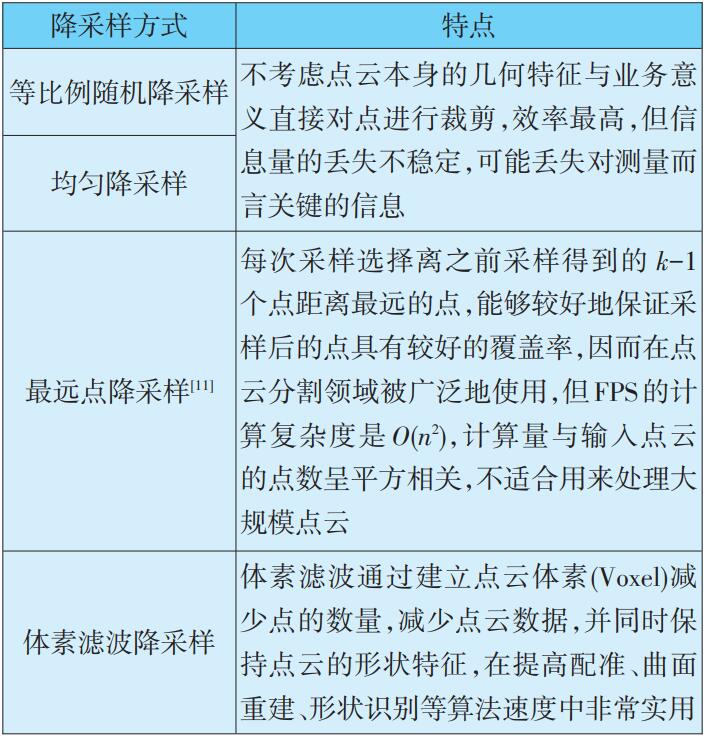
根据隧道数据特点,本文采用基于中心点的体素滤波方法进行降采样处理。按照现场工程精度要求,自动将点云进行体素化划分,并获取其最接近中心的点予以保留,以达到保留点云特征的同时降低点云数据量的目标。
(4)点云的地物分离。在隧道工程应用中,地面与非地面对象通常不需要进行关联性处理。例如隧道的点云测量应用场景多集中于隧道壁及其附属物,而不需要关注地面的情况。因此,为提高点云处理效率、降低无用点信息对系统的干扰,如何有效识别地面信息,降低复杂地形的不必要影响也是系统需要关注的预处理流程之一。近二十年来,国内外学者对此提出了大量有效的自动滤波算法,包括基于形态学滤波法、PTD滤波法、CSF滤波法。其中,CSF算法提出时间较近并受到国内外学者的一致认可,故本文采用CSF算法进行地物分离处理流程,并通过对隧道测量点云数据的先验知识进行滤波器各种参数的优化设置,以降低地形特征的影响。
对降采样后的点云进行了地物识别后,可根据用户需要在后续处理中直接剥离地面点与非地面点。
(5)点云的点特征提取。点云的综合处理与工程应用离不开对其特征的提取,由于特征提取针对不同的应用领域有不同的需求与实现方法,包括三维 Harris 检测子和本征形状签名等,为了不限定后续点云处理的应用范围,本文并未在点云预处理过程中直接进行特征算子的提取,仅使用了SVD矩阵分解等数学方式对点云特征值、密度等基础几何特征进行了预先计算,并作为点云的附加维度属性信息保存于特定的数据结构中。
最后,通过基础几何信息与对点云自动转换计算得到的工程属性(如里程、中心点距离等)结合,形成兼顾处理效率、点云规模、业务信息的点云模型。
2.4 数据应用
基于测算一体化技术生成的点云模型,通过网页、手机端、平板电脑等方式可直接解析、计算、展示、统计,形成以下数据应用点:
(1)线,沿着空间定线的法向量方向对点云切片,获得一系列的隧道切面的点云数据。这些数据可作为线分析的基础,通过对比隧道断面的设计轮廓线生成实际的超欠挖轮廓线和净空检测结果等。
(2)面,可将某次扫描的点云沿隧道中心线按某个指标展开生成正交影像图,如检核初期支护平整度等。也可将多期次扫描点云叠加,按相同的计算指标实现区域形态变化的跟踪,如隧道围岩变形分析等。
(3)体,通过同一里程段的不同工序的点云叠加,生成体模型,通过体模型分析可得出初期支护、二次衬砌的厚度及混凝土使用方量等。
3 应用实践
3.1 项目简介
某铁路2号隧道位于四川省甘孜藏族自治州境内,康定至火夹仲区间。隧道以东南—西北走向穿越著名的“康巴第一关”折多山,进口位于东麓折多河北岸的折多塘村,海拔约为3 220 m。受折多塘断裂带及其他主干、次级断裂影响,隧区多为Ⅴ、Ⅵ级围岩,软弱破碎富水,高地应力、大变形、高地温、地下高温热水等复杂工程地质问题突出,此外还有冰雪灾害、季节性冻土等自然灾害,工程难度大,风险高,非常有必要采用“测算一体化”技术来实现隧道质量检测及安全监测的“实测实量”,即时发现问题,进行现场快速处置。
3.2 硬件与系统选型
扫描设备选择天宝X7三维激光扫描仪,其具有无需整平、后方交汇设站、多站自动拼接、高速扫描、高精度、激光放样、防护性高等特点,适合隧道工程现场高湿多尘环境。隧道后处理软件为国内自主研发,可提供隧道各工序所需的各种指标检测及监测功能,同时具备优秀的智能化及轻量化特点。处理硬件选择微软 SurfacePro7 平板电脑(i7 处理器、16GB内存),其平板触控交互的方式利于现场操作,且具备一定的算力。系统构成如图6所示。
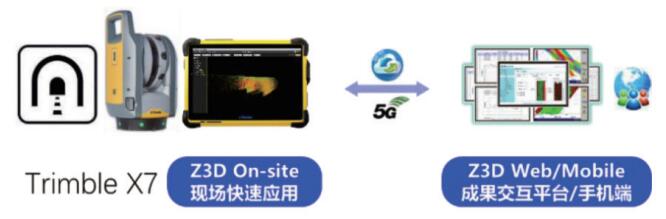
图6 某铁路隧道应用系统
3.3 实施路线
(1)设计信息在交互平台上录入或直接导入。
该隧道的设计信息通过导入参数及CAD图纸,约5min 即可完成设计模型的建立。如果已有隧道的BIM设计,也支持以IFC格式文件直接导入。
(2)架设仪器、操作 X7 打开激光指示器,分别照准隧道壁上两个钢钉标识的已知点,确保交汇夹角大于 45°、小于 135°,进行后方交汇设站。此时,X7 将自动整平后测量,并提示设站精度及误差为“优,水平误差1 mm,高层误差1 mm”。扫描密度选“低”档位,扫描时间为95 s,扫描速度为50万点/s,扫描半径为 80 m,获取有效点云数量不低于 1 200万点,点间距为 4 cm@35 m,测距精度为 2 mm@60m。同时利用 X7 自带的 3 个同轴相机进行全景拍照,选择“快速”档,拍照时间为1 min,获取隧道全景照片。扫描及拍照完成后,数据通过X7自带的局域WiFi网络实时无线传输至SurfacePro7平板电脑,一站扫描及拍照从架设仪器到数据传输完成,用时约5 min。作业现场情况见图7。

图7 三维扫描作业现场
(3)经过后方交汇设站,X7扫描获取的点云已具有工程坐标,多站扫描情况下将自动完成拼接,无需额外进行配准及坐标转换。随后,将扫描点云导出为las格式数据,通过自研软件一键读取。读取点云的同时,软件将自动完成工程坐标与里程及偏距的转换计算、点云数据的降采样及格式转换等步骤,该过程约为2 min。此时,扫描获取的所有点均已具备隧道特征属性,与隧道定线及里程匹配,并按设计断面计算法向量值。点云与设计的匹配见图8。
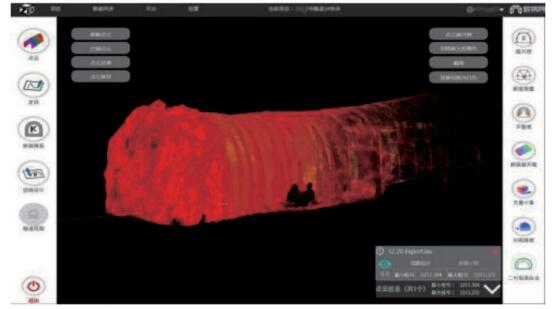
图8 已与隧道定线、断面设计相匹配的点云
(4)点云自动过滤。作业人员仅需要指定待分析的里程段及对应施工工序,软件将自动匹配对应的断面设计进行点云过滤,有效去除包括风管、电线等在内的隧道壁杂物,并将无用的地面点剥离,运算全程自动进行,无需人工干预。综合考虑点云密度及遮挡等情况,现场选取一站扫描,以仪器为中心的前后 15 m,共 30 m 里程为分析范围,用时约 1 min。点云自动过滤后效果见图9。
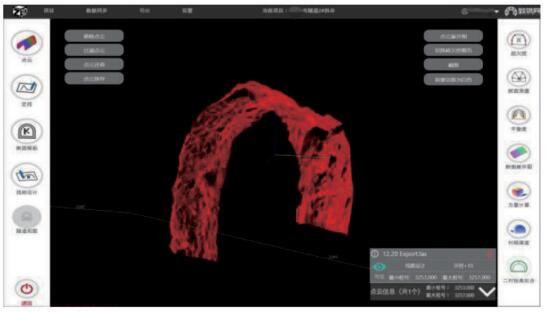
图9 一次循环的爆破开挖点云自动过滤效果
(5)生成分析成果。作业人员根据检测需要,
指定分析参数,软件即自动生成各个工序的关键指标成果,包括超欠挖、平整度、侵限、厚度、方量等,并以断面图、热点图等行业惯例方式呈现。在30 m范围,按1 m每断面分析,形成超欠挖、方量等报告耗时约1 min。生成的成果分析数据、图表可立即导出为PDF报告或CAD图纸,当场即作为检测结果交付施工作业队复核处置。
针对该隧道的实际特点,隧道后处理软件提供了包括大纵坡修正(点云切片垂直于竖曲线方向)、线性补点(点云被遮挡从而导致缺失的部分通过附近点云进行算法拟合补齐,如风管遮挡等)等细节优化,从而确保数据计算结果最大限度符合现场的工程要求。现场查看分析结果见图10。
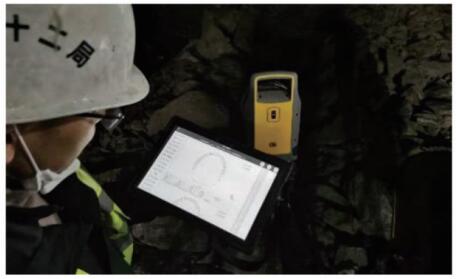
图10 作业人员现场查看检测结果
(6)特征点放样辅助、闭环检核。分析成果中发现的问题点,如欠挖点等,除现场导出交底报告给作业队外,也可通过简单地点击问题点标号,操控X7 进行自动激光指向、快速定位。发现问题点位后,隧道后处理软件可一键导出csv格式文件,用超欠挖值对问题点进行点号命名,并在X7扫描作业界面可视化展示。作业人员仅需简单地点击对应点号,X7将自动激光指向该点位,辅助现场标识、处置。快速处置后可再次进行扫描,完成对问题点的复核。整个过程无需离开隧道、无需其他设备协助,现场即实现了“检测—处置—复核”的闭环流程,使数据不落地、问题不搁置。激光快速定位问题点见图11。

图11 激光快速定位问题点
(7)成果交互应用。该隧道实现了无线网络覆盖,因此作业人员无需离开隧道,在收纳设备的间隙,选择本次扫描的成果报表及过滤后的点云,就可完成一键上传至交互平台,供管理人员在线浏览点云、下载报表等。该隧道的多种报表格式按照工程要求进行定制,无需编辑即可直接打印、签字、归档。同时,管理人员安装移动管理端app后,可随时随地通过手机查看各种报表及按超欠挖着色的点云成果,实现移动办公。通过交互平台查看扫描成果见图12。

图12 在线查看成果报告
至此,该隧道三维激光扫描的外业、内业任务全部完成。
3.4 实践效果
经过该隧道工程的实践应用,通过对现场反馈的不断完善及优化,隧道三维激光扫描“测算一体化”技术可以达到现场扫描、现场分析的内、外业结合,实现问题即时识别并处置、复核的闭环检核流程,提供基于网页、手机管理端的交互共享应用成果,满足“测”与“算”有机结合的目标。
(1)“测算一体化”三维激光扫描技术应用,设备轻便、软件简便,单人即可完成全部扫描内、外业任务,可为项目部至少减少一位测量人员配置。同时,数据运算的自动化、智能化显著减少了人工操作的步骤,降低了对作业人员的技能水平要求。
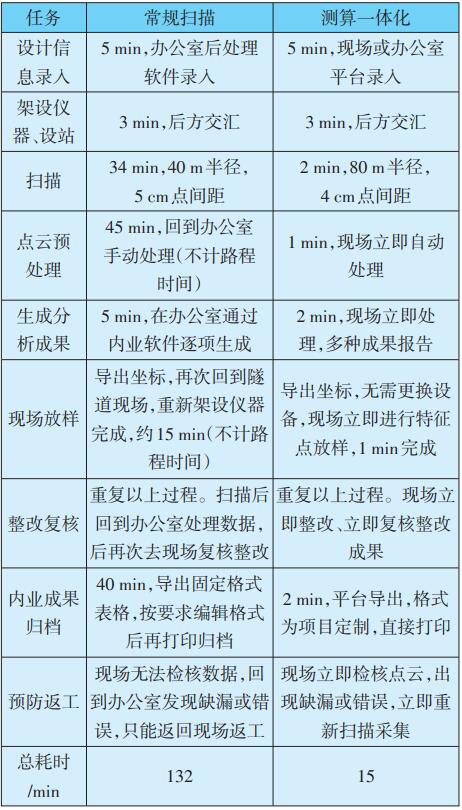
(2)现场扫描,从架设 X7 开始至数据分析、上传,在15~20 min内全部完成,成果报表可直接下载打印,实现了内、外业无缝结合,极大减轻了文档工作量。相较常规扫描方式下,数据需回到办公室进行人工点云剔除、多种软件结合分析、报表格式手动调整等繁复的操作方法,单次扫描任务可总体节省人员工作时间2 h。一次常规扫描与测算一体化扫描任务时间对比如表2所示。表中,常规扫描数据来自该铁路 1 号隧道(采用硬件设备为徕卡 MS60,后处理软件为徕卡 Infinity);测算一体化数据来自该铁路2号隧道(采用本文方案),对比工点为相邻隧道,隧道设计、施工环境、检测要求等类似。现场均进行1站扫描、分析30 m里程范围数据,实施单位相同。
表2 扫描任务时间对比
(3)精度高、数据可靠。以软件自动生成的超欠挖分析报告为例,经测量人员复核对比,其结果与传统全站仪方法得到的结果整体趋势完全相同,单点数据差别仅在毫米级别,完全满足现场应用的要求。
(4)在隧道现场即可快速完成“分析、识别、处置、复核”的闭环处置流程,显著提升了问题的处置率和时效性。该铁路2号隧道的工程实践,实现了重大问题100%现场处置并复核。
(5)应用范围涵盖隧道爆破开挖、初期支护、二次衬砌、竣工检测等环节涉及质量、安全、成本管控的关键指标,充分发挥了三维激光扫描技术的特点和优势。
4 结 语
三维激光扫描本质上是一种实景数字化技术,是信息化、BIM应用、数字孪生应用等的重要一环。在隧道建设中使用激光扫描技术可实现关键工序及过程数据的全量采集及实时分析,对隧道施工安全促进、质量保证、成本控制均有重要意义。同时,激光扫描后得到的点云数据与BIM设计是良好的结合体,可有力推动隧道建设的数字化进程,是隧道施工与检测技术发展的重要技术方向。
本文提出隧道三维激光扫描“测算一体化”应用技术,并结合某铁路2号隧道工程实践,解决了现有应用流程中“外业”与“内业”脱节的问题,实现了现场扫描、现场分析、现场识别问题并处置的应用目标,整个过程操作简便、快捷高效,充分发挥了三维激光扫描的技术优势,有力促进了隧道施工的质量控制、安全保障及成本节控。文中提出的点云自动过滤、降采样、地物分离、特征点提取、数据应用的算法体系,可在常规平板电脑上流畅运行,为数据在现场实时分析奠定了算法基础。而基于隧道专业的设计信息录入、数据采集、数据预处理、数据分析及成果交互应用流程,将内业工作整合到外业测量中一并完成,经某铁路隧道工程实践,符合施工作业习惯,明显提高了检测效率,可进一步研究、补充、完善,从而作为标准应用方法,乃至于工法推广应用。最后,该技术方案实现的“实测实量”应用效果,有力促进了在隧道施工检测过程中即时发现问题、现场处置并复核,减少了返工,对隧道施工安全管控和质量保证具有重要的现实意义。
未来,随着三维激光扫描技术在测量精度、点云密度、影像集成等能力上的不断提升,可在计算机视觉、深度学习等技术领域扩展点云测算一体化技术路线,从而将其进一步应用于隧道施工过程检测及安全监测的更多方面,如钢筋网、钢拱架的自动提取与间距检测,围岩形变区域实时分析,掌子面智能素描,围岩等级智能判断等,开启隧道建设的数字化新时代。
摘自《现代隧道技术》