1 引 言
盾构机推进系统由推进千斤顶、液压泵、控制阀件和液压管路等组成,通过千斤顶作用于成环管片环面产生的反力使盾构机在地层中沿着设计轴线向前掘进。为降低控制难度,便于推进纠偏的手动操作,往往需将推进油缸进行分区编组,并为每个区配置独立的比例减压阀进行压力开环控制,常见的有四分区和六分区两种。分区控制往往依赖于人工操作经验,然而时下成熟盾构司机稀缺,其现实背后蕴藏着巨大的施工风险。大数据行业带来的红利促进了盾构施工技术领域的数字化发展与转型,越来越多的盾构智能化建造和辅助决策技术正在逐步替代人工操作,提高建造效率和施工质量的同时降低施工成本与安全风险,较为典型的有管片智能拼装技术、管片裂缝渗漏水识别技术、盾构泥水压力、掘进位姿、地表沉降等预测技术。
在盾构推进系统总推力矢量预测方面,国内外学者基于模糊控制理论、室内模型试验、数据学习等方法进行了大量的研究,旨在寻找对应特征地层条件和施工工况下的合理值,以期为推进系统的分区压力设定提供参数。已有的研究与工程实践均基于传统盾构工法进行,即不改变盾构“掘进—停机—拼装—再掘进”的串联式施工方法,通过设定固定分区的目标压力值以开环控制的方式响应盾构掘进负载,完成向左、右、上、下单一方向的盾构姿态控制,操作方法虽简单但并不是最为科学合理。以目标总推力矢量为导向、推进系统全油缸全控为前提的自由分区推进方式更契合盾构矢量推进理念。
再者,随着国内外对长大盾构隧道绿色、智能、高效建造需求的日益提升,以盾构总推力矢量智能预测为基础的盾构推拼同步技术显然是较优策略。因盾构机改造成本与应用难度低,基于推进系统压力主动控制理念提出盾构推拼同步技术,其原理是以目标总推力矢量为基础,在部分推进油缸回缩进行管片拼装作业的同时剩余工作油缸须保持推进状态。然而,若直接采用传统盾构机进行推拼同步操作,盾构司机无法通过复杂运算完成推进系统参数的动态设定以实现总推力矢量的稳态控制,盾构机将面临严重的姿态失稳和轴线偏离风险。传统盾构机在推力冗余和控制系统设计方面均不支持推拼同步。
本文提出基于目标总推力矢量的盾构推进系统压力闭环控制技术,以适应盾构推进系统自由分区和推拼同步技术的控制需求,并通过构建大型盾构矢量推进试验平台对本技术进行可行性试验验证。所得研究成果将为盾构智能化高效掘进提供极有力的技术储备。
2 技术原理
与传统分区油缸共享单个比例减压阀不同,基于目标总推力矢量的推进油缸压力闭环控制技术以推进系统全油缸全控为前提,即为每个推进油缸单元配置独立的比例减压阀和压力传感器。全油缸推进过程中,由智能化系统给出目标总推力矢量(包括总顶推力 FT、水平合力矩 MTh 和垂直合力矩 MTv)。根据自由分区需求和总推力自定义分配原则,为每个推进油缸单元确定目标顶力,并根据油缸面积换算成无杆腔目标压力和对应推进油缸单元比例减压阀的开度。通过油压传感器反馈无杆腔实际压力并进入PID运算后动态调整阀的开度,直至完成目标压力的响应(图 1)。
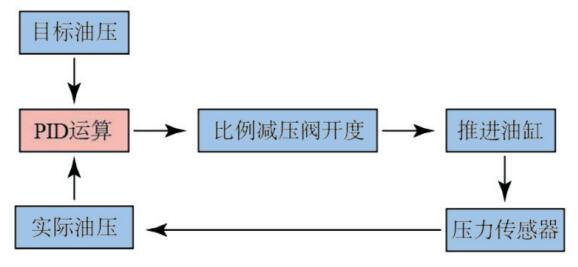
图 1 目标压力的闭环控制原理
盾构推进过程中油缸主动关闭、使用损坏或因推拼同步主动缩回待拼装管片范围内的油缸都将造成部分推力的缺失,为维持目标总推力矢量,须将缺失顶力进行再分配。缺失顶力按照自定义再分配原则进行计算后作为目标顶力增量叠加至剩余工作油缸目标顶力初值后形成目标顶力终值,从而进入上述闭环控制进行执行。
3 大型模型试验平台构建
为验证基于目标总推力矢量的盾构闭环推进控制方法的可行性,本次试验搭建了大型模型试验平台(外尺寸为13 m×8 m×8 m),如图 2所示。试验平台主要由外框架、负载系统、盾构试验机、底部滑动支撑和钢管片等5个部分组成。
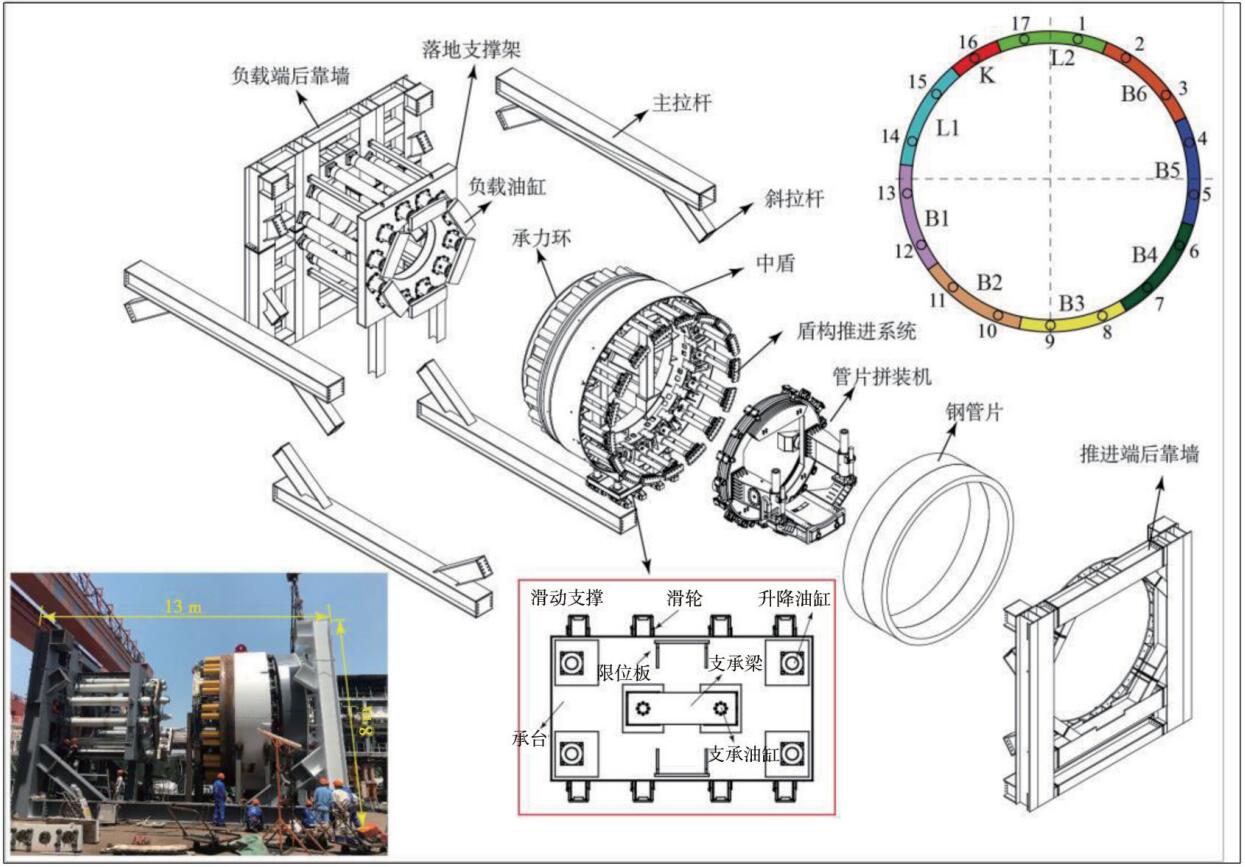
图 2 试验平台
为直接反映盾构推进系统压力响应真实情况,本次试验将壳体外径约为6.8 m的土压平衡盾构机进行改造,保留中盾、推进系统和管片拼装机3个部分的前提下在试验机前端安装圆形承力环。推进系统由 17 组缸径 240 mm、行程 2 200 mm 的双联油缸组成(油缸编号见图 2),每组油缸均配置独立的比例减压阀、油压和行程传感器,使之具备独立的压力调整和伸缩功能。已有关于隧道掘进的试验研究因模型盾构机结构尺寸较小均模拟了地层条件,而本次试验在兼顾盾构机结构尺寸、试验重复性需求以及试验安全性等多个因素后放弃地层模拟,取而代之的是在试验机的底部中心位置安装球面凸点,使之与底部滑动支撑的支承梁形成单点接触,除竖向位移被约束外,剩余5个自由度均不受限,尽可能地放大总推力矢量的稳定能力对盾构机位姿的影响,为试验机提供最不利工作条件。
负载系统与推进系统设计理念一致,由6组缸径360 mm、行程3 000 m的环向均匀分布的双联油缸组成,分布半径为1.8 m。油缸底座固定于负载端后靠墙,前端搁置于支撑架,油缸顶块与试验机圆形承力环接触,掘进方向上最大可输出13 800 kN的负载力。滑动支撑由承台、升降油缸、支承油缸、支承梁、滑轮和限位板等组成。其中,升降油缸用于顶升试验机至设计高度,支承油缸活塞杆与支承梁连接可与试验机单点接触,限位板的设置可使试验机带动滑动支撑共同运动。钢管片设计适配推进系统结构尺寸,外径 6.5 m,环宽 0.95 m,厚 0.25 m,采用 22mm厚Q235钢板制作。整环管片共9分块,1块封顶块K,2块邻接块L1和L2,6块标准块B1~B6。除封顶块范围内含1组油缸外,其余管片均含2组。管片拼装顺序为B3、B4、B2、B5、B1、B6、L1、L2、F。
4 全油缸自由分区推进试验
4.1 自由分区顶力分配方法
本文提出一种适配于不同管片拼装工况下同块同压的顶力分配方法。以推进系统圆心为坐标原点O建立关于推进系统端总推力力矩点(MTh, MTv)的直角坐标系XOY,并以此为基础建立共享原点O、x轴正方向穿过封顶块中间位置的管片拼装端关于总推力转换力矩点 (M′Th, M′Tv) 的直角坐标系xOy。β为管片拼装端相对于推进系统端的坐标系旋转角,当β为逆时针旋转角时取值为正,顺时针旋转角时为负。

图 3 总推力力矩的坐标转换
总推力力矩点A与原点O之间的连线关于X轴正方向的夹角α以及总推力合力矩MT的定义如下:
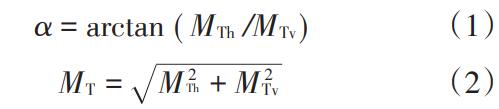
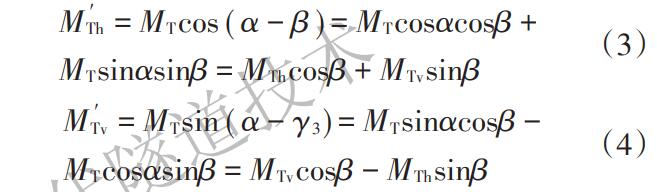
A点在坐标系xOy 的坐标(M′Th, M′Tv)可进一步表示为:
如图 4所示,将推进系统油缸根据管片分块范围进行9分区,自封顶块起从上到下对各分区目标顶力进行线性分配,计算分量F1、F2 和F3通过以下3个方程进行求解:
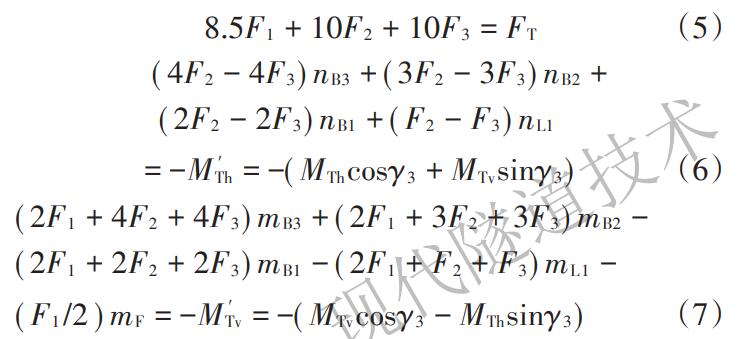
式中:mB3、mB2、mB1、mL1 和 mF分别为B3、B2、B1、L1和 F 块范围内分区顶力合力点至 x 轴的竖向距离;nB3、nB2、nB1 和 nL1 分别为 B3、B2、B1 和 L1 块范围内分区顶力合力点至y轴的水平距离。
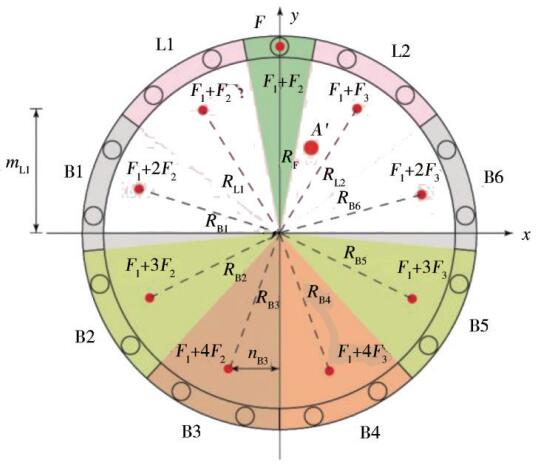
图 4 顶力分配计算模型
待 F1、F2 和 F3求解后,根据各分区油缸组数进行平均,即可获得各推进油缸的目标顶力。
4.2 试验情况说明
如图 5所示,本试验结合4个管片拼装工况(即4个旋转角β)进行自由分区推进操作,模拟上海典型软土地层覆土厚度11 m条件下直径14 m级泥水平衡盾构机直线推进工况。盾构机掘进负载包含刀盘前方水土压力、盾构机侧摩阻力、盾构机自重产生的摩阻力、管片与盾尾间摩擦力以及盾构机对后方台车的拉力。负载系统设定负载力FF、水平合力矩 MFh和垂直合力矩 MFv分别为 10 702 kN、0 和-4 328 kN·m。为获取推进系统目标总推力矢量,试验初期先采用常规手动六分区设定推进参数,待试验机稳定推进(推进速度为16 mm/min)且姿态控制在合理范围内一段时间后,将各油缸当前实际无杆腔油压进行提取计算。目标总顶推力FT、水平合力矩MTh 和垂直合力矩 MTv 分别为 12 569 kN、101 kN·m和-4 938 kN·m。
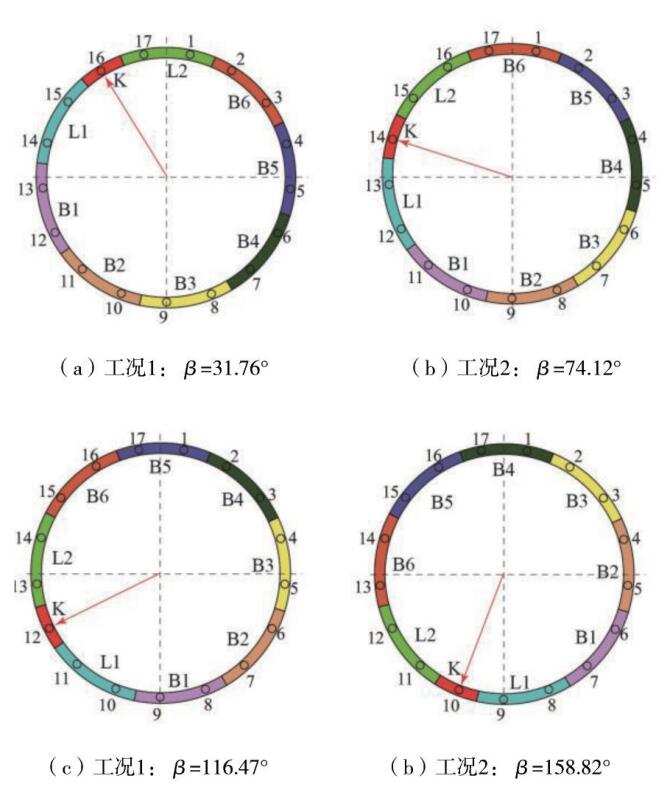
图 5 试验工况
4.3 试验结果分析
自由分区推进过程中全油缸目标压力响应情况如图 6所示。从图中可以看出,随着目标压力的不断切换,各推进油缸实测压力受PID闭环控制,在以目标值为平衡位置附近均表现出振荡波动。由于比例减压阀的工作性能(压力与开度的线性程度)不同,不同推进油缸压力的实际波动范围差异明显,量值上整体控制在目标值±4% 范围内。管片拼装工况的切换过程中各推进油缸目标压力变化虽较小,但总体执行情况良好,为推进系统总推力矢量的稳定控制奠定了基础。
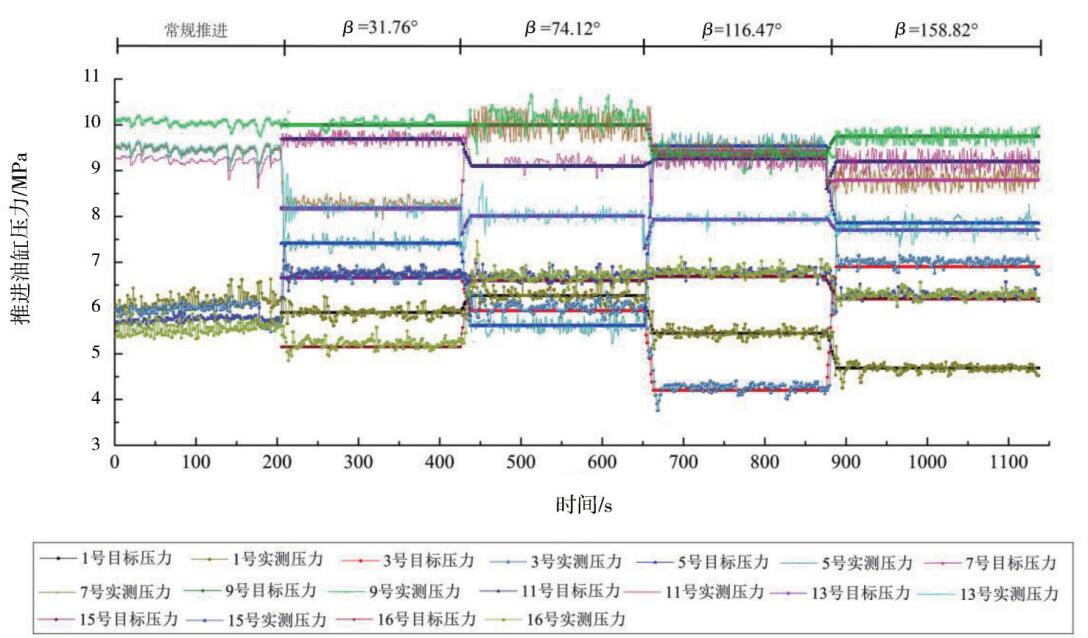
图 6 全油缸自由分区推进试验的油缸压力响应
从图 6中同样可以发现,在目标压力切换瞬间,油缸实际压力无法瞬时到位,存在约3 s左右的响应延迟。因此,从图 7标注处可以反馈出总推力存在较明显的陡降特征。整体上,因油缸压力良好的执行质量,总推力和垂直合力矩均在目标值附近稳定波动,误差分别控制在±2.5%和±18%范围内。总推力矢量的稳定控制为试验机的稳态推进起到了较好的支撑作用。
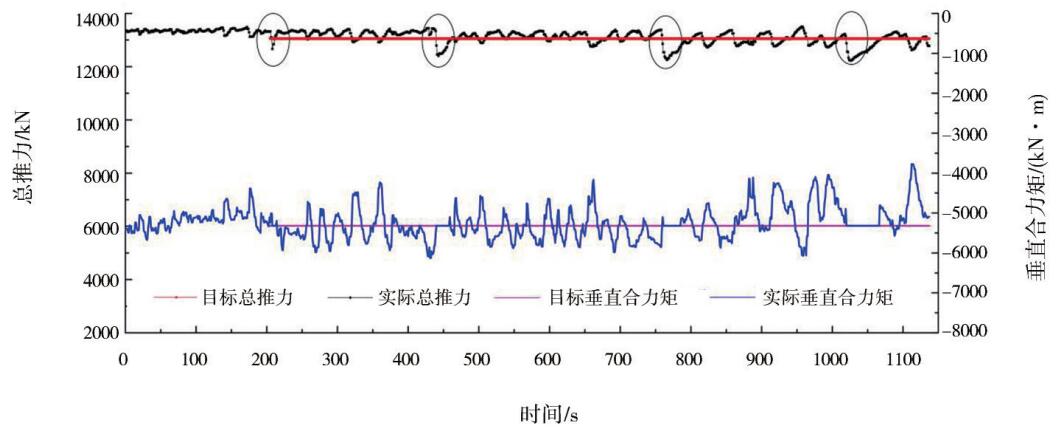
图7 全油缸自由分区推进试验的总推力矢量
如图 8所示,在全油缸自由分区多次切换推进条件下,由于目标总推力矢量执行质量较高,试验机推进整体稳定,情况良好。数据上,盾构推进速度和盾构姿态偏差分别稳定在各自初值的±1 mm/min和±0.1 mm范围内,波动范围极小。
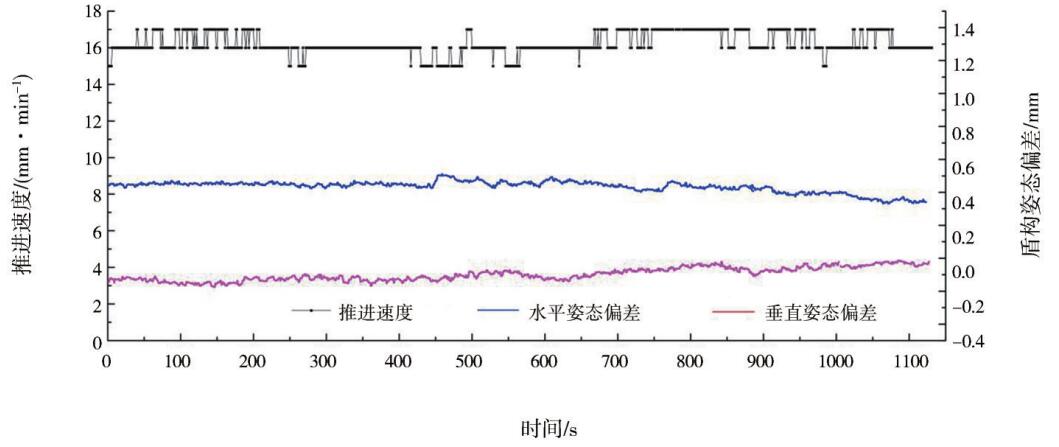
图8 全油缸自由分区推进试验的盾构姿态和推进速度
上述数据整体反映出,当目标总推力矢量确定后,推进系统的压力闭环控制执行度较高,符合盾构机高质量稳定推进的要求。
5 缺失顶力自补偿推进试验
5.1 缺失顶力再分配方法
本文对一种盾构推拼同步过程中因同步拼装管片造成部分顶力缺失的再分配方法进行举例,且因各管片拼装时再分配计算方法一致,故选取B3块作为典型进行说明。
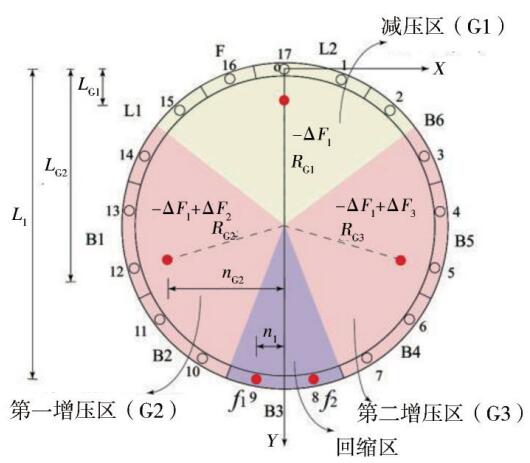
图 9 缺失顶力的再分配计算模型(B3)
计算模型如图 9所示,建立直角坐标系XOY,将管片环连同推进系统旋转至待拼装管片中间位置,位于Y轴负半轴,原点位于顶部油缸中心位置。将推进系统分为四区,待拼装管片范围内油缸为回缩区,回缩区对应直径另一端范围内油缸为减压区,Y轴左右两侧剩余油缸分别为第一和第二增压区。回缩区内缺失顶力 f1+f2被划分为-ΔF1、-ΔF1+ΔF2 和-ΔF1+ΔF3三个分区目标增量顶力,ΔF1、ΔF2 和 ΔF3计算公式如下:
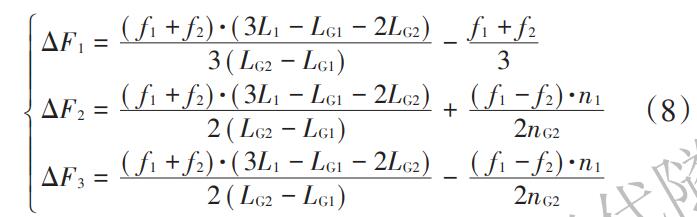
式中:LG1、LG2和L1为分别为减压区分区增量顶力、第一增压区分区增量顶力和回缩区缺失顶力作用点至X轴的垂直距离;nG2和 n1分别为第一增压区增量顶力和回缩区缺失顶力作用点至Y轴的水平距离。
基于 ΔF1、ΔF2 和 ΔF3获取各分区的目标增量顶力,并根据各区对应的油缸组数平均值作为各油缸的目标增量顶力,叠加至全油缸推进下的初始目标顶力,形成同步拼装管片时各推进油缸的目标顶力终值。
5.2 试验情况说明
本次试验模拟上海典型软土地层覆土厚度10 m条件下直径14 m级泥水平衡盾构机直线推进工况。负载系统设定负载力 FF、水平合力矩 MFh和垂直合力矩MFv分别为10 157 kN、0和-4 328 kN·m。与自由分区推进试验初始操作相同,当试验机速度稳定在 18 mm/min,获取目标总顶推力 FT、水平合力矩MTh和垂直合力矩MTv分别为12 563 kN、-109 kN·m和-6 413 kN·m。为确保试验安全,每次被回缩油缸重新伸回后,试验机将进入全油缸推进状态以模拟管片拼装准备工作,全油缸状态下各油缸的目标压力如图 10所示。
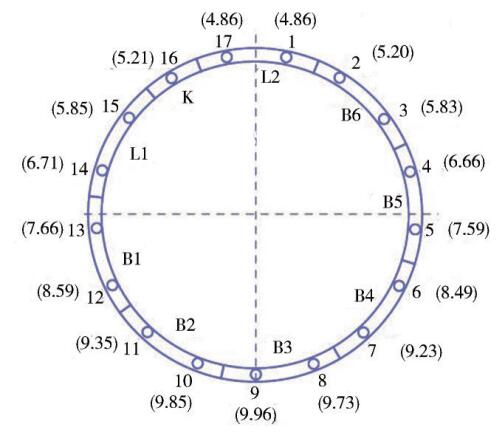
图10 全油缸状态下的目标压力(单位:MPa)
5.3 试验结果分析
图 11 给出了同步拼装管片时各油缸目标压力的增减以及实际的响应变化情况。由图可以看出,各推进油缸目标压力响应特征与自由分区推进试验一致,受限于阀的性能,同样存在响应延迟的现象,量值上整体依然控制在±4% 范围。推进系统总推力矢量执行情况如图 12所示,在部分油缸回缩退出工作的条件下,由于各推进油缸目标压力的有效响应,除目标压力切换瞬间的骤降现象,推进系统总推力矢量维持稳定,波动范围为目标值的±2%。总推力矢量的有效执行为推拼同步技术的可行性提供了强有力的支持。
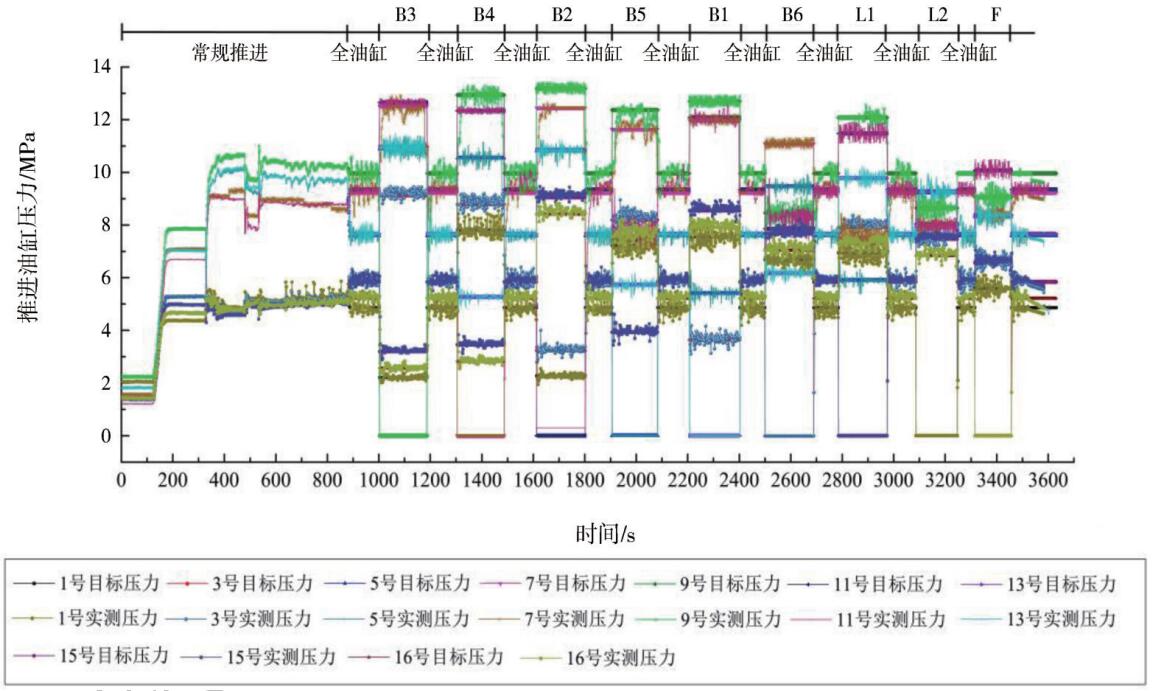
图11 缺失顶力自补偿试验的油缸压力响应
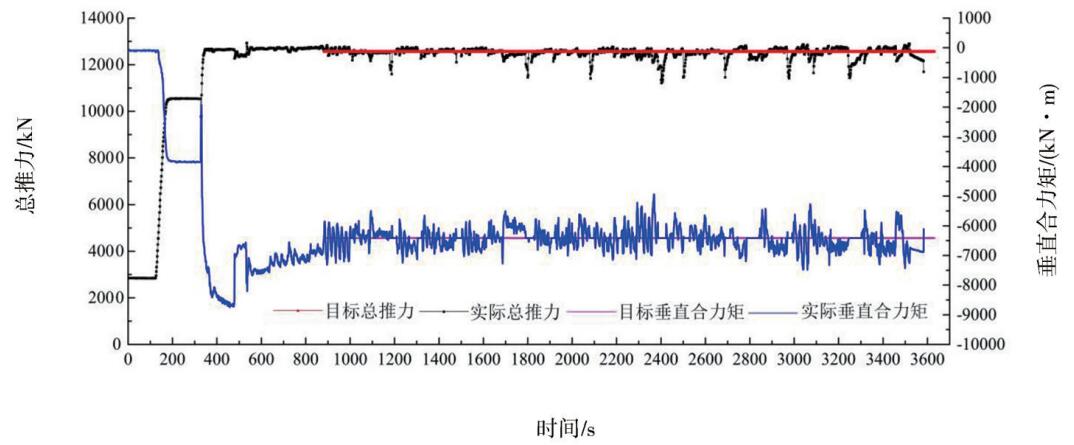
图 12 缺失顶力自补偿试验的总推力矢量
图 13给出了同步拼装管片条件下的盾构推进速度和盾构姿态变化情况。相比全油缸自由分区推进试验,缺失顶力自补偿试验表现出截然不同的变化特征。当待拼装管片范围内油缸回缩,推进系统泵源流量输出因没有动态调整产生了因瞬间供油过量导致试验机加速的情况,且因油缸压力响应延迟、推进系统供油不均匀等原因造成了盾构姿态的突变。待推进泵供油匹配不了试验机高速推进,试验机的推进速度将下降,而过程中因总推力矢量维持稳定,盾构姿态偏差保持不变。
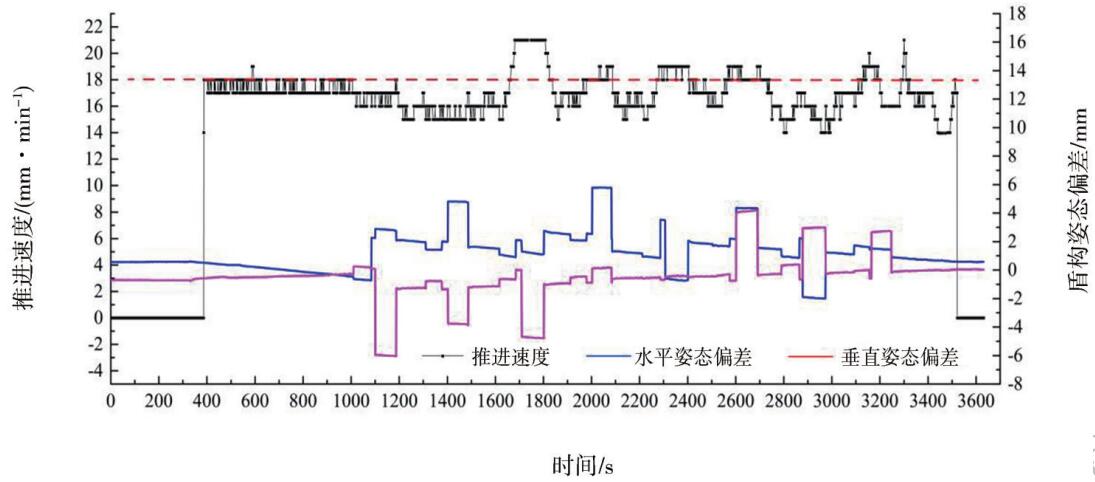
图 13 缺失顶力自补偿试验的盾构姿态和推进速度
管片拼装完成后,推进系统恢复到全油缸工作状态,盾构姿态偏差也将恢复到初值。从图 13中可以看出,试验全过程中,试验机推进速度控制在初值的±3 mm/min 范围,盾构姿态偏差整体控制在初值的-6~+4 mm范围,但当一环管片拼装完成后盾构姿态终值恢复到初值。盾构推进速度以及盾构姿态的控制质量是决定推进油缸压力主动闭环控制型盾构推拼同步技术可行性的关键指标,从试验反映的情况可以判断同步拼装管片过程中,推进系统总推力矢量维持能力较强,该技术的可行性程度较高。
6 结 论
(1)全油缸自由分区和缺失顶力自补偿推进过程中,各推进油缸目标压力受减压阀工作性能影响执行质量略有差异,但实测压力相较于目标压力的差值控制在±4%的范围,执行情况良好。
(2)受各推进油缸目标压力响应延迟的影响,总推力在目标压力变更瞬间出现骤降现象,但全过程维持稳定,实际值控制在目标值±2%的范围。
(3)全油缸自由分区推进过程中盾构机推进速度和盾构姿态维持质量较高,缺失顶力自补偿试验过程中,因推进泵流量输出不受控导致盾构机在部分油缸回缩时产生加速现象,又因油缸压力响应延迟与流量供给不均匀产生姿态突变的情况。
(4)缺失顶力自补偿过程中,推进系统进入全油缸推进状态后,盾构姿态和推进速度都能恢复到初值,尤其是一环管片拼装结束后,盾构姿态的完全恢复奠定了推拼同步技术可行性的基础。
(5)后续将结合管片结构受压和稳定方面开展进一步研究。
摘自《现代隧道技术》