0 引言
城市综合管廊具有布置整洁、运营维修便利等优点,可提高土地集约使用率,大大减少“马路拉链”现象,越来越多的综合管廊应用在城市建设中。传统的综合管廊多采用大放坡开挖、围护桩支护下现浇方式施工,具有土方开挖/回填大、桩基支护成本高、机械化程度低、工人劳动强度大、施工质量不可控的缺点。采用装配式预制综合管廊施工能够减少现场支模浇注环节,且工厂预制能够明显提高管节质量。近年来,国内已展开对预制管廊机械化施工的探索,例如: 海口椰海大道综合管廊项目采用U形盾构施工,能够实现移动支护条件下的廊槽开挖、管节拼装,在减少开挖占地、节约围护桩支护成本方面具有显 著优势,但仍存在垫层施工、管廊拼装效率低的问题;雄安新区某综合管廊项目采用架廊机进行拼装施工,有效解决了长节段、大吨位、整体式预制拼装综合管廊架设安装中的技术难题,但存在大放坡沟槽开挖地表占用面积大、综合造价高的缺点。结合上述2种机械化施工装备的优点,探索一种能够实现廊槽开挖、侧墙移动支护、管节同步拼装的一体化施工装备及施工方法成为发展趋势。基于上述需求,本文创新性地融合盾构技术和架桥技术,提出一种预制综合管廊盾架一体化施工装备———U盾架管机,并通过理论计算、模拟分析、整 工业试验等方法对U盾架管机施工关键技术展开研究,以期为综合管廊U盾架管机施工应用提供参考。
1 U盾架管机及其施工流程
1.1 U盾架管机
为了解决综合管廊盾架一体化施工难题,研制了U盾架管机,整机示意如图1所示。设备主要由底部的U形盾体和上部的架管机2大部分组成。U形盾体包括前盾、中盾、尾盾,前盾和中盾通过铰接油缸连接。前盾前端两侧设置有可前后移动的插刀,在掘 进时对两侧墙土体形成临时支挡; 前盾底部设置有上下移动的推板,可推平开挖面并调整开挖高差。将整个U形盾体视为移动的围挡支护结构,可对开挖断面的底部及两侧墙形成有效支撑。上部的架管机包括固定于U形盾体上的前支腿、具备自行走功能的后支腿、可相对前支腿前后左右移动的主梁以及行走在主梁上的吊具,可满足预制管节的起吊、转运、拼装。此外,本设备还配备有铰接调向系统、推进行走系统、垫 层摊铺系统、侧缝同步回填系统。
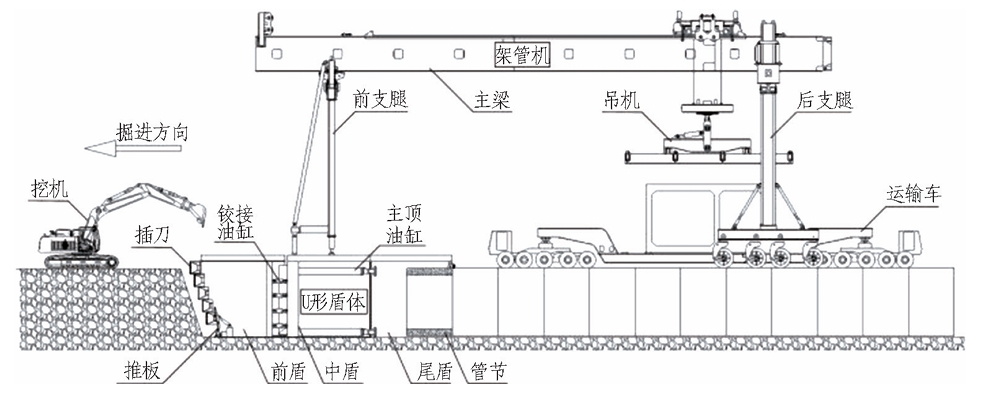
图1 U盾架管机整机示意图
1.2 施工流程
U盾架管机施工流程如图2所示。首先,采用挖掘机开挖土方,U形盾体前移,在尾盾内侧空出管节拼装空间,采用架管机进行预制管节拼装;然后,中盾内的主顶油缸顶推已经拼装好的预制管节,压紧管节之间的密封;同时,相邻2环管节采用螺栓连接,油缸推动U盾架管机向前移动,架管机前支腿同U形盾体一起相对主梁向前滑动,推进完成后,架管机主梁连同后支腿,在后支腿驱动轮的驱动下,向前行走1环管节的距离;最后,位于U形盾体内的垫层摊铺系统铺设垫 层并平整之后,开始下一循环管节的吊装;与此同时,在挖掘机开挖土方时侧缝回填系统同步工作,将一部分开挖出来的土方经过振动筛分后与水、水泥、粉煤 灰、速凝剂等混合后搅拌均匀,形成速凝液态土,在U盾架管机向前推进时,同步填充至已经拼装好的管廊 两侧的缝隙内。管廊交叉口等节点处采用钢制过渡桥作为临时管节,为U盾架管机提供推进反力。
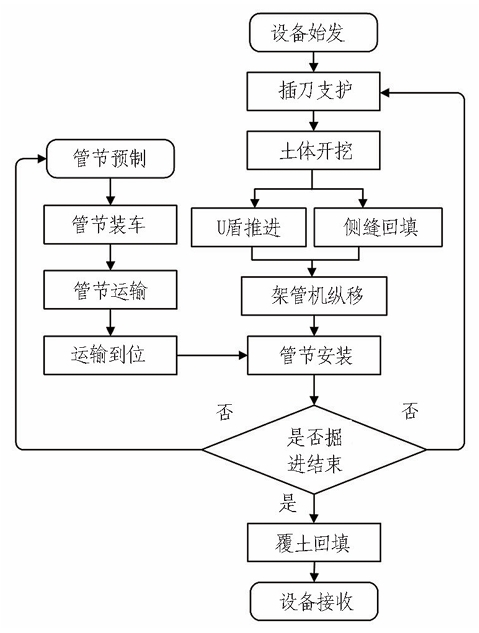
图2 U盾架管机施工流程
通过对施工流程的分析发现,影响U盾架管机施工质量的关键为管节密封压紧力控制、掘进过程中的 姿态控制、平纵曲线的适应性等。
2 U盾架管机施工关键技术研究
2.1 管节密封压紧力计算及顶推力控制技术
为保证装配式管廊接缝密封性能,以往管节拼装后多采用液压拉拔器进行张拉。为减少张拉环节,拟在U盾架管机的主顶油缸压紧管节密封的条件下进行连接螺栓安装。为保证足够的密封压紧力,对U形盾体前移所要克服的推进阻力进行分析,受力分析示意如图3所示。由图可知,需满足掘进机推进阻力F>密封压紧力F1 +管节与地面之间的摩擦力F2。G为U形盾体的重力,kN;G2为架管机前支腿落在U形盾体上的重力,kN; F3为U形盾体底部摩擦力,kN;F4为U形盾体侧部摩擦力, kN; F5、F6分别为U形盾体两侧及底部欠挖土体的切削反力,kN。
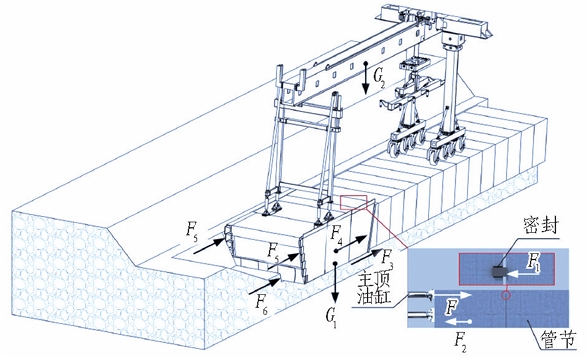
图3 U盾架管机推进受力分析示意图
2.1.1 管节密封压紧力及摩擦力计算
根据GB 50838—2015《城市综合管廊工程技术规 范》8.5.7节规定,预制拼装综合管廊拼缝防水应采用预制成型的弹性密封垫为主要防水措施,弹性密封垫的界面应力不应低于1.5 MPa。管节密封压紧力及摩擦力计算如式(1)和式(2)所示。 F1 =S1×1.5×1000。(1) F2 =G管× f管-土。(2) 式(1)—(2)中: S1为密封橡胶圈截面面积,m2; G管 为管节重力,kN; f管-土 为管节外壁与土的摩擦因数,混 凝土管节与土的摩擦因数一般取0.6。
2.1.2 U形盾体推进阻力计算
为保证足够的密封压紧力,仅依靠U形盾体与土体的摩擦力来提供显然是不够的,还需预留掌子面的部分核心土,以增加U形盾体掘进的迎面阻力。U盾架管机推进前移时,前方掌子面分层开挖(见图4),最上层管廊顶板以上的浅层土体进行放坡台阶的预开挖,设备前方核心土进行分台阶开挖,预留底部和两侧(图4中红色区域)部分核心土,利用U形盾体底部的 推板和两侧的插刀进行切削。
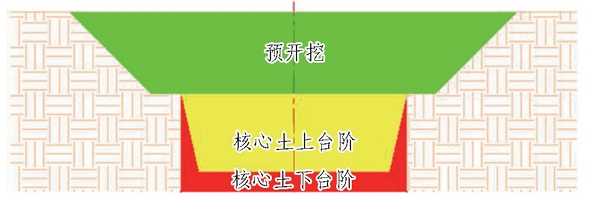
图4 掌子面分层开挖示意图
U形盾体推进阻力F计算如式(3)所示。 F=F3 +F4 +F5 +F6 。(3) F3 =(G1 +G2 )× f钢-土。(4) F4 =S2 ×γ×H×k× f钢-土。(5) 式(3)—(5)中: f钢-土 为钢板与土的摩擦因数,可取0.2; S2 为U形盾体侧部面积,m2; γ为土体重度(无 水地层),kN/m3; H为U形盾体高度方向中部的覆土 深度,m; k为侧向土压力系数,可取0.5。U形盾体两侧及底部欠挖土体切削适用滑移面破坏机制,切削模型如图5所示。切削力大小与欠挖土体厚度及土体自身的摩擦角、黏聚力等因素有关。
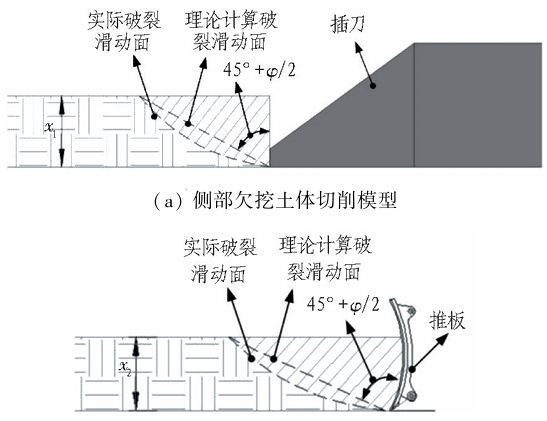
(b)底部欠挖土体切削模型
图5 U形盾体两侧及底部欠挖土体切削模型
(6)F6 =2×l2×[x2 ×cos(45°+φ/2)]×τ。(7) 式(6)—(7)中: l1 为一侧插刀高度,m; x1为侧部欠挖 土体厚度,m;φ为土体内摩擦角;τ为土体抗剪强度,根据库仑定律,τ= c+σtan φ(c为土的黏聚力,σ为土体 受到的法向应力,欠挖土体在基坑一侧处于临空状态时,法向应力σ= 0); l2为底部推板的总宽度,m; x2 为底部欠挖土体厚度,m。以双舱管节、粉质黏土地层为例,管节断面尺寸为 8 000 mm×4 500 mm,环宽为3 000 mm,双舱管节质量 约为85.6 t,内摩擦角取30°,黏聚力近似取30 kPa。经理论计算,管节密封压紧力及管节与地面之间摩擦力的合力F1 +F2 =3000 kN。U形盾体两侧欠挖 0.5 m、底部欠挖1 m时,总推力阻力F=F3 +F4 +F5 + F6 =3 120 kN,满足管节之间密封压紧力的要求。此外,通过控制主顶油缸压力间接控制管节密封压紧力, 主顶油缸设计为单独可控模式保证了密封环周压紧力 的均衡性,节省了传统管节拼装后采用液压拉拔器进 行张拉的工序。
2.2 掘进姿态控制技术
为适应U盾架管机掘进过程中的地质不均匀性及设计轴线线形,U盾架管机需具备姿态调节功能。首先,通过导向系统对设备姿态进行位置检测;然后,通过铰接系统、推进系统进行调向控制,辅以插刀、推板的超欠挖;最后,将掘进姿态控制在允许的 偏差范围内。
2.2.1 U盾架管机姿态控制针对性设计
2.2.1.1 导向系统
U盾架管机导向系统以自动导向系统为主,并辅以人工测量监测姿态。导向系统配置了全站仪、激光靶,将采集的数据传输至主控室,上位机动态显示U盾架管机当前位置与隧道设计轴线的偏差、滚转偏差以及趋势,为设备司机提供纠偏依据。U盾架管机每推进120~130 m,导向系统后视基准点需要间歇性前移一次,为保证推进方向的准确可靠,每掘进约25环进行一次人工测量,以校核自动导向系统的测量数据 并复核U盾架管机的位置、姿态,确保U盾架管机掘 进方向正确。
2.2.1.2 铰接、推进调向系统
前盾和中盾通过铰接油缸连接,中盾盾体内环周 布置有主顶油缸,均采用上下左右分组设计(如图6所示),每个分组均设置有行程传感器及高灵敏度压 力传感器,可以调节每组油缸的推进速度和推力大小, 进而可以在推进过程中对U盾架管机的姿态进行主 动调整,实现推进方向的微调。
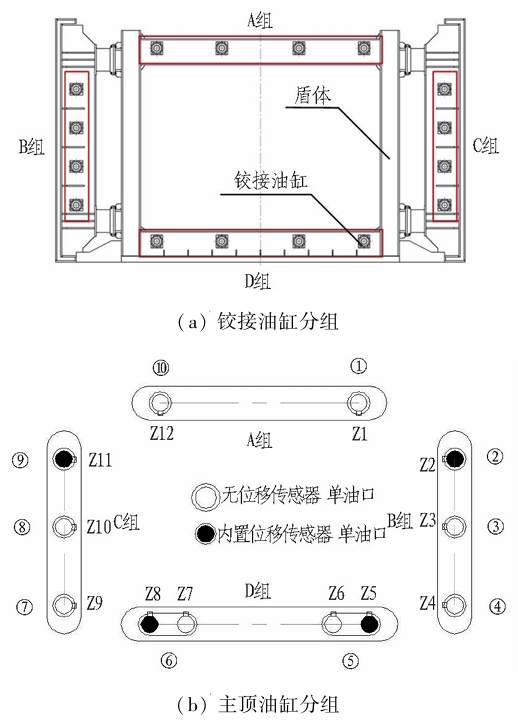
图6铰接油缸和主顶油缸分组
2.1.1.3 插刀、推板超欠挖系统
为辅助U盾架管机开挖及纠偏,前盾前端左右两侧设置有可前后移动的插刀(如图7所示),前盾前端底部设置有可仰俯转动的推板。插刀头部设置有采用螺栓连接的可更换插板,可通过更换插板的方式调节插刀相对于盾体的超挖量,用于辅助调节盾体的水平姿态;通过油缸伸缩控制推板上下摆动进而调节盾体 底部的超欠挖量,用于辅助调节盾体的俯仰姿态。推板超欠挖示意如图8所示。
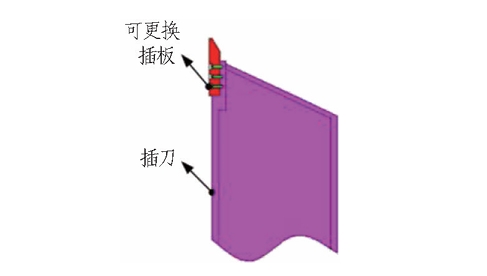
图7 插刀插板结构
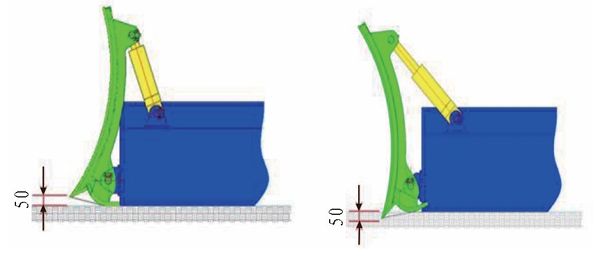
(a)油缸缩回欠挖状态 (b) 油缸伸出超挖状态
图8 推板超欠挖示意图(单位: mm)
2.2.2 U盾架管机施工姿态控制注意事项
1)U盾架管机姿态调整时需边推进边调向,依据 导向监测数据,通过调大转弯方向另一侧的铰接油缸、主顶油缸压力,同时调大转弯方向一侧的推板或插刀的超挖量实现转弯。
2)当U盾架管机处于水平线路掘进时,应使U盾架管机保持稍向上的掘进姿态,以纠正U盾架管机因自重而产生的低头问题。
3)在上坡段掘进时,适当加大U盾架管机下部油缸的推力;在下坡段掘进时,适当加大上部油缸的推力。
4)均匀地质掘进时,保持所有油缸推力一致;在软硬不均地层中掘进时,应根据不同地质的具体情况, 遵循硬地层一侧主顶油缸的推力适当加大、软地层一侧油缸的推力适当减小的原则来操作。
5)为了保证U盾架管机盾尾密封良好,同时也为了保证隧道管片不受破坏,U盾架管机在调向过程中 不能调向过量,并采用勤纠偏、小纠偏原则,即各分组油缸的行程差不宜过大,一般在导向系统上显示的任一方向的趋势值不宜大于10 mm(折线转弯时除外)。
2.3 平、纵断面折线转弯施工技术
平、纵断面曲线转弯均可通过2.2节所述的调控方式完成,但部分工程为减少预制管节模具数量、降低模具费用投入,未设置楔形管节,一般会在非标准节段 (节点位置)处将曲线转弯优化为折线转弯。折线转弯工况下一般通过可调节环宽的楔形过渡桥先行空推 通过,然后采用现浇方式进行折线管廊的施作,因此需对U盾架管机折线转弯进行适应性分析。
2.3.1 水平折线转弯段施工
为保证在折线段顺利完成U盾架管机设备的调向,针对折线段设计了可通过螺纹丝杠调宽的楔形过渡桥,楔形过渡桥满足U盾架管机推进压力,并且过渡桥间的螺栓抗剪强度满足U盾架管机调向要求。U盾架管机通过多节楔形过渡桥和主顶油缸行程差逐步完成U盾架管机的调向,若仅靠主顶油缸不足以提供折线转弯力时,可辅助在U盾架管机盾体外侧增加液 压千斤顶 受限于主顶油缸球头的极限偏转角(4°),U盾架 管机一次最大能转4°;同时,受限于架管机主梁在前后支腿顶部横撑上的扭转量,U盾架管机最大转弯量不能超过8°。本文以双舱管廊为例进行分析,小于等于4°的水平折线转弯施工流程如下:
1)折线转弯段需提前放坡开挖至槽底,开挖前后 长度不小于盾体长度,槽底两侧各扩挖不小于1 m,沟 槽底板视情况采用混凝土浇筑。折线转弯段开挖轮廓见图9。
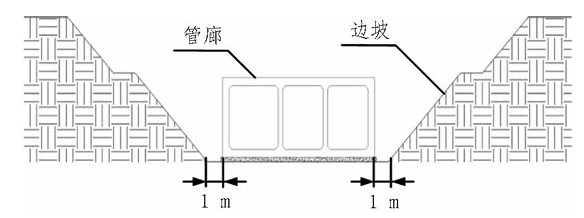
图9 折线转弯段开挖轮廓
2)拼装1节环宽3 m的过渡桥并推进,如图10 所示。
3)拼装1节环宽2 m的过渡桥,推进至尾盾脱离 标准管节。
4)控制不同分组左右侧主顶油缸压力差进行转向推进。当转向力不足时,可在盾体外部液压千斤顶 辅助下完成折线转弯,按图11所示1#、2#、3#位置安装方木和3个30 t液压千斤顶,利用左右侧主顶油缸行 程差和侧部辅助液压千斤顶转弯4°,千斤顶行程不够时,可在方木与千斤顶之间增加不同厚度和不同数量的铁。
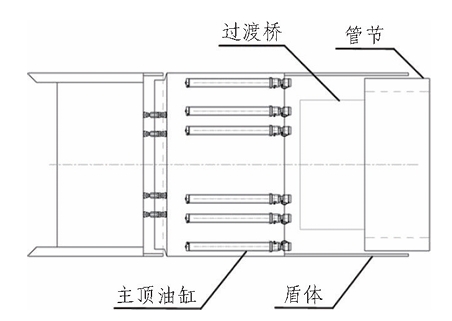
图10 拼装1节环宽3m的过渡桥
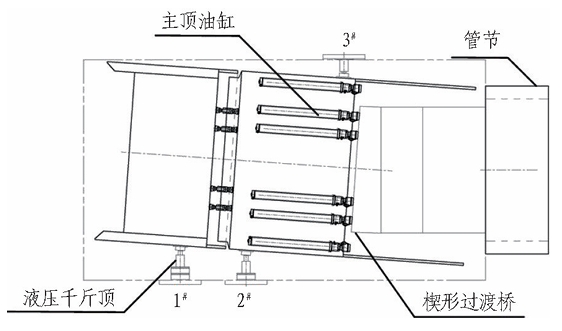
图11 转向推进示意图
5)下放楔形过渡桥并顶进,至此转弯完成。
2.3. 2 竖直折线转弯段施工
综合考虑U盾溜坡、架管机后支腿行走打滑因素,设备可满足最大70‰折线纵坡施工。爬坡过程中 通过铰接油缸底部全伸、顶部油缸全缩,辅助以推板欠挖,在主顶油缸推进下完成抬头70‰坡度掘进;待前盾全部上坡后,爬坡过程中再逐步伸出顶部铰接油缸。转弯节通过架设2个可调节过渡桥、2个3m标准过渡桥通过,如图12所示。
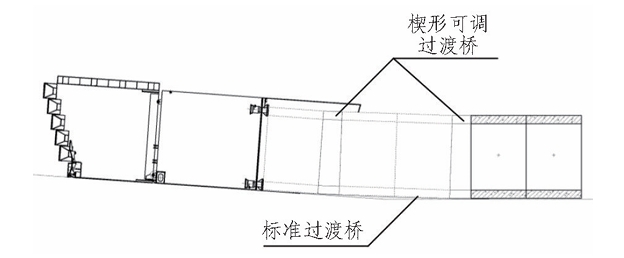
图12 竖直折线转弯段模拟
2.4 U盾与架管机协同施工控制技术
2.4.1 U盾与架管机掘进、调向协同控制
正常掘进过程中,U盾推进和架管机纵移(前后移动)是先后2个独立的工序。为保证设备安全,U盾推进时锁定架管机后支腿不能纵移,主梁在前支腿横撑上相对向后滑移;架管机纵移时,锁定U盾不能推进,主梁在前支腿横撑上相对向前滑移。此外,推进过程 中需时刻注意U盾和架管机的移动量同主梁与前支腿的相对滑移量保持一致(这2个数据均可通过位移传感器从上位机读取),避免U盾和架管机相对运动时主梁与前支腿卡滞造成设备损害及事故。 设备调向时,架管机的纵坡或横坡姿态倾斜到某一角度值时(根据设备设计能力不同而不同,雄安新区某综合管廊项目纵坡为70‰,横坡为25‰),上位机应具备预警功能,需及时通过纠偏系统调整U盾姿态,避免超出安全预警值造成施工风险。
2.4.2 U盾与架管机管节安装协同控制
管节安装时,需保证架管机主梁同前支腿销轴锁死,并将后支腿行走轮和U盾主顶油缸锁止,启动主梁吊具将管节从运输车辆上起吊并移动至拼装位置进行管节安装,通过协同控制管节吊具装置和尾盾微调装置(如图13所示),调整好管节姿态后下放到位,随后解除U盾推进锁止功能,U盾的主顶油缸伸出压紧管节后安装管节连接螺栓。
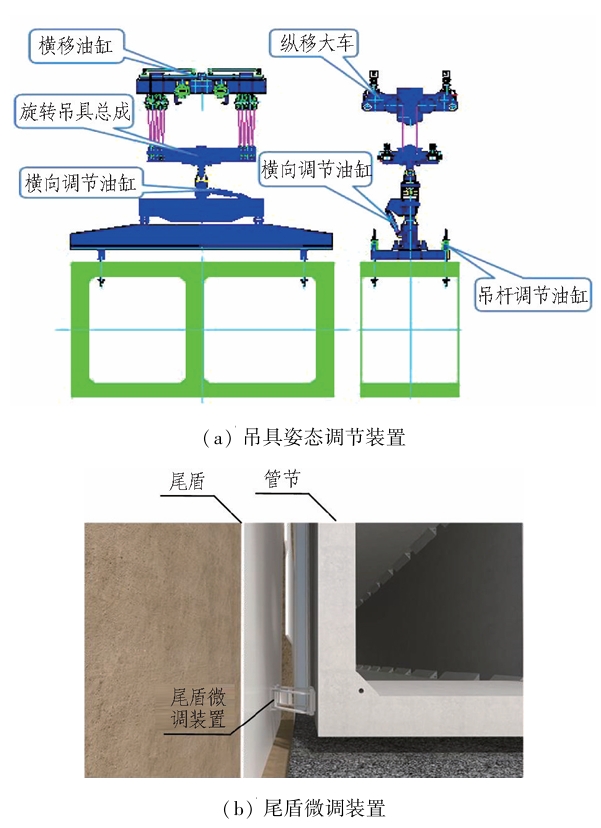
图13 管节姿态调节装置
3.1 工程介绍及应用情况
试验项目为雄安新区某综合管廊工程,预制管廊段线路总长为2.4km,其中,三舱段长1366m(含非标节点空推段),双舱段长1024 m(含非标节点空推段)。埋深8~10 m,地质为粉土、粉细砂、黏性土无水地层,地基土承载力为120 ~140 kPa,管廊可利用天然地基作为持力层。三舱管廊截面宽度为11.1 m,高度为4.5 m,长度为3 m,质量为115.5 t,共324节;双 舱管廊截面宽度为8 m,高度为4.5 m,长度为3 m,质量为85.6 t,共215节。2023年10月25日“雄安号”U盾架管机顺利完成整个标段的施工,创造了双舱管廊最高日进尺33 m (11环)、最高月进尺407m,三舱管廊最高日进尺 36m(12环)的施工记录。整个工程共完成7次转弯, 最大折线转弯角度为7.7°,完成变舱1次(双舱变三 舱),完成转场1次,设备施工效果良好。
3.2 施工数据统计分析
3.2.1 实际顶推力及密封压紧情况
现场施工中,通过U形盾体两侧及底部土体欠挖量,控制上位机检测的主顶油缸推进力大于3000 kN,保证了管节密封压紧力满足1.5 MPa的需求。另外,根据密封条性能,可通过控制密封压缩量(管节间隙 压缩至13~17 mm)间接判断密封压紧效果,如图14所示。为防止密封因过压缩而失效,管节端面间隙可 粘贴10 mm厚的橡胶传力衬垫。通过采用该密封压 紧连接技术,每环管节(环宽3 m)掘进拼装平均用时控制在3h以内。
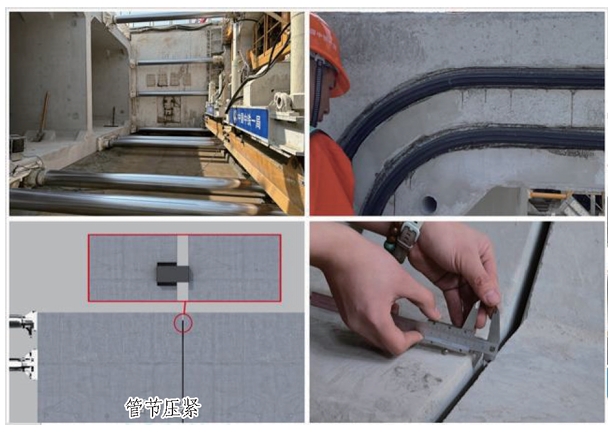
图14 密封压紧及测量
3.2.2 纠偏及折线转弯应用情况
对于U盾架管机的现场姿态控制,首先通过导向系统对设备姿态进行位置检测,再通过铰接系统、推进系统进行调向控制,辅以插刀、推板的超欠挖进行推进。在折弯段采用楔形可调过渡桥较好地完成了折线转弯,如图15所示。对设备平纵线路拟合偏差进行统计,结果如图16所示。除了在折线转弯段因人为大幅度调向导致平纵偏差接近±50 mm外,正常掘进阶段均能将平纵偏差控制在±20 mm以内,较好实现了掘 进姿态的有效控制。
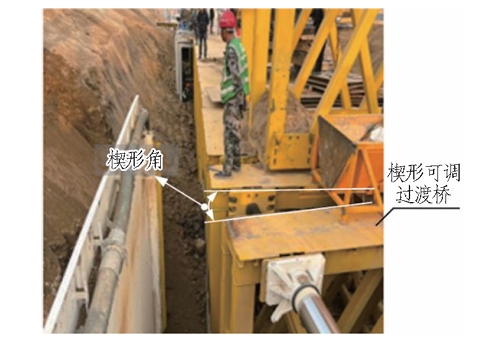
图15 楔形可调过渡桥辅助转弯 Fig.
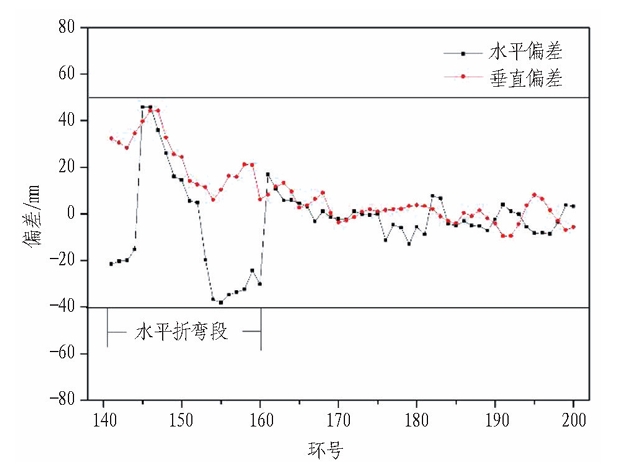
图16 平纵线路拟合偏差
4 结论与讨论
本文结合预制综合管廊盾架一体化机械施工需求,以雄安新区某综合管廊项目为依托,对U盾架管机开挖、推进、调向、管节安装等一体化高效施工关键技术进行了研究,并通过现场应用验证了U盾架管机 施工预制综合管廊的适应性、高效性、可操作性,得出如下结论:
1)构建了U盾架管机推进受力模型,阐明了掌子面欠挖核心土对推进阻力的影响,通过所构建的数学 模型可计算不同管节所需的管节密封压紧力对应的核 心土欠挖量,验证了U盾架管机采用主顶油缸压紧管节密封的可行性,提升了管节连接的效率及质量。
2)通过插刀、推板的超欠挖进行辅助纠偏,采用主顶油缸、铰接油缸分组协同控制,能够较好地将掘进 姿态控制在±20mm以内。
3)采用可调节环宽的楔形过渡桥能够顺利完成U 盾架管机平、纵断面折线转弯,最大水平折线转弯达7.7°,最大纵坡折线转弯达70‰;同时,将折线段设置在现浇节点处,采用可重复使用的楔形过渡桥通过,节省了楔形管节的制作费用。该U盾架管机的研制和成功应用,满足了预制综合管廊沟槽开挖、设备推进、掘进调向、管节安装等工序的一次施工成型需求,实现了综合管廊领域新设备与新工法的协同创新突破。但受限于U盾架管机设备及敞开式明挖施工特点,该U盾架管机尚不能满足富水软弱地层施工,后续还需进一步结合富水软弱地层工程需求,针对性优化多场景下的U盾架管机及其施工技术。