1 引 言
我国是一个河流湖泊众多,水域分布广阔的大国,七大水系纵横分布。渤海湾、北部湾、杭州湾等大型海湾面积均超过5000km2,而城市交通便利性依赖于丰富的水域体系。因此,建设大直径水下隧道不仅是现阶段研究的重点方向,同时也是我国交通基础设施建设过程的必经之路。水下隧道具有受外界干扰小、不影响通航等独特优势,对于城市空间的节约以及促进城市可持续性建设具有重要的里程碑意义。
目前,水下隧道仍然面临着诸多亟待解决的科学问题和技术瓶颈。首先,在水下隧道修建过程中,面临着复杂多变的地质条件,水下隧道所处的地层一般具有天然含水率高、可压缩性强、力学强度低等特点,易造成地基基础沉降过大、不均匀沉降和基底失稳等事故。同时,水下隧道在实际的运维中会遭遇频繁的水位波动以及水中腐蚀离子的侵蚀,导致一些隧道仅仅在15~20a的使用期内就出现衬砌劣化和钢筋腐蚀等问题。此外,由于我国地处喜马拉雅地震带和环太平洋地震带,地震活动较为频繁,这些地震带覆盖了广大领土,使得我国各地均存在不同程度的地震风险。同时,水下隧道工程不仅投资大,建设工期长,一旦工程出现破坏,将造成不可估量的经济损失。党的二十大提出“发展海洋经济,保护海洋生态环境,加强建设海洋强国”,重点支持海洋交通设施建设和发展,并提高海洋防灾减灾能力,完善海洋服务体系。因此,提高水下隧道建造与运维技术是水下盾构隧道工程必须解决的重大问题。
鉴于此,本文首先对水下隧道的发展现状进行梳理回顾。其次,分析阐述水下超大直径隧道建设中面临的一系列挑战。在此基础上,针对水下盾构隧道施工阶段和运维阶段现有技术发展进行系统介绍与讨论,以期为水下盾构隧道安全建造与智慧运维技术体系建立提供参考,助力提升水下盾构隧道的施工质量以及抗风险能力,为城市的基础设施建设提供有力的支持。
2 水下隧道发展现状
水下隧道位于水体下方,受到高水压条件和高腐蚀等水下环境因素的影响。水下隧道的修建需要考虑特殊的水下环境要求,因此相对于普通隧道,水下隧道的建设会面临更多的施工难题。水下隧道作为一种独特的交通和基础设施工程,经历了漫长的发展历程。早期的水下隧道通常是为了连接城市的两岸,以便加强城市之间的交流和联系。其中最著名的早期尝试是英国伦敦的“泰晤士河隧道”(Thames Tunnel),由Brunel设计并于1843年顺利竣工,是世界上第一条水下隧道,当时引起了广泛的关注。在1880年,美国纽约市修建了连接曼哈顿到布鲁克林的水下隧道,为全球水下隧道建设开辟了新的领域。而在20世纪60年代,跨越英吉利海峡的英法海底隧道正式开始修建,并于1994年完工,成为当时最长的海底隧道。此外,日本也修建了众多的水下隧道,如东京湾隧道、青函隧道等。
我国于1965年修建了第一条跨越黄浦江的水下隧道——打浦路隧道,是我国在水下隧道建设领域的初步探索。进入21世纪以来,随着我国经济的快速发展和工程能力的显著提高,一系列长距离越江跨海隧道的建成和投运标志着我国水下隧道施工成套关键技术取得了显著进步。截至2021年底,我国共修建245条水下隧道,其中采用盾构法施工的隧道有171条,占比为69.8%。这些水下隧道主要分布在经济发达的地区,包括广东、江苏、上海、浙江等省市,例如,厦门翔安海底隧道、长沙湘江营盘路隧道、广深港高速铁路狮子洋隧道、汕头苏埃海底隧道、港珠澳沉管隧道等项目。随着我国技术的不断进步和工程经验的累积,越来越多的长距离、大直径、高水压、复杂地质的水下隧道将被规划修建。国内在建最大直径水下盾构隧道——深圳荷坳隧道,其管片外径达到了17.5m。现今,直径达到14m或更大的超大直径盾构隧道已成为主流,用以支持双层4/6车道或单层3车道的交通需求,图1所示为我国现有水下隧道断面尺寸分布统计。水下隧道的发展历程见证了工程技术的进步,也反映了人类克服自然界地理限制的能力。在接下来的章节中,将深入探讨水下大直径盾构隧道工程在建造和运维过程中所面临的挑战。
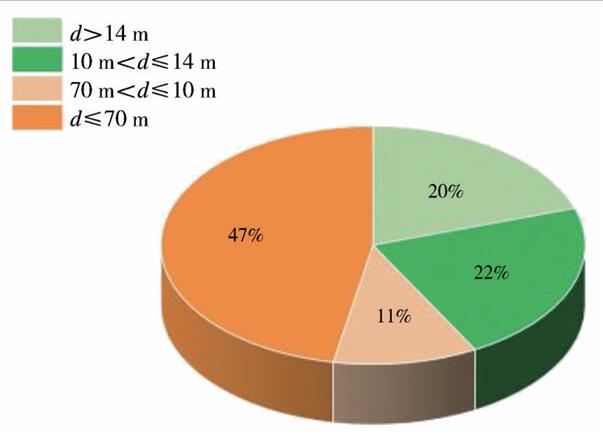
图1 水下盾构隧道直径分布
3 水下盾构隧道建设面临的挑战
不同场地水下隧道施工时,其施工方式以及施工时所遇到的问题也不尽相同。在修建过程中,针对场地地质条件的不同,一般可采用盾构法、钻爆法、沉管法。目前盾构法是水下隧道的主要修建方式,占国内水下隧道建设的7成左右。因此,本文以水下盾构隧道为主进行介绍。
3.1 典型工程案例介绍
(1)南京长江隧道
南京长江隧道是在长江修建的风险最大的大型越江隧道,其盾构直径为14.50m,采用的泥水盾构机工作压力达到0.65MPa。在穿越砾砂地层时,地层渗透系数高达1×10-2cm/s,泥浆难以平衡地层水压力且开挖面的稳定难以保证。在穿越粉细砂层时,由于隧道掘进对地层扰动以及承压水作用,面临管涌或地层不均匀沉降,南方长江隧道地质纵断面图如图2所示。
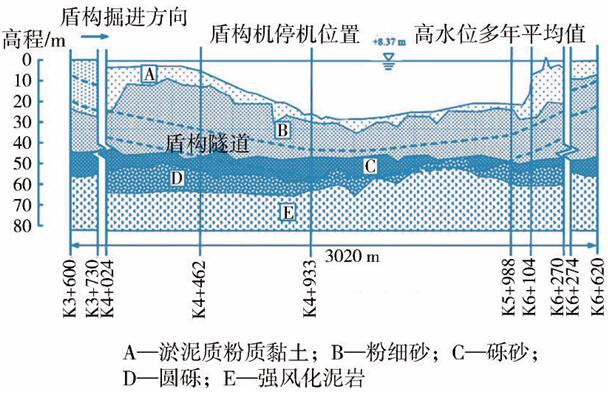
图2 南京长江隧道地质纵断面
(2)珠海十字门隧道
十字门隧道工程位于珠海市香洲区南部,是未来横琴新区发挥“衔接港澳,辐射内陆”的重要对外交通体系。盾构掘进段总长940m,隧道直径15.20m,隧道最大纵坡-5.0%,最小转弯半径599.75m,呈现为反“S”形(图3)。工程面临着超大直径极限小曲率掘进所引起的管片错台破损和地层变形等问题。
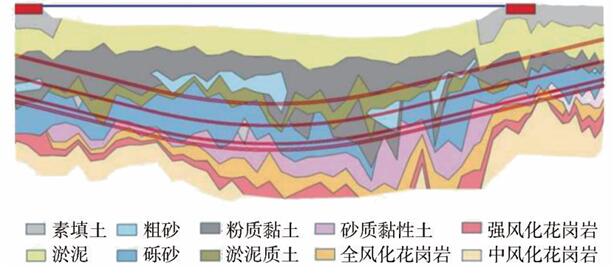
图3 十字门隧道盾构段地质纵断面
(3)深港高速铁路狮子洋隧道
深港高速铁路狮子洋隧道位于珠江流域,是世界首座高速铁路水下盾构隧道。盾构隧道自上而下穿越淤泥层、强风化砂岩、泥岩及弱风化含砾砂岩(图4)。工程面临盾构长距离穿越软硬不均段、全断面泥岩和断层破碎带等不良地质,给合理配置刀具以及掘进施工风险控制提出了新的挑战。
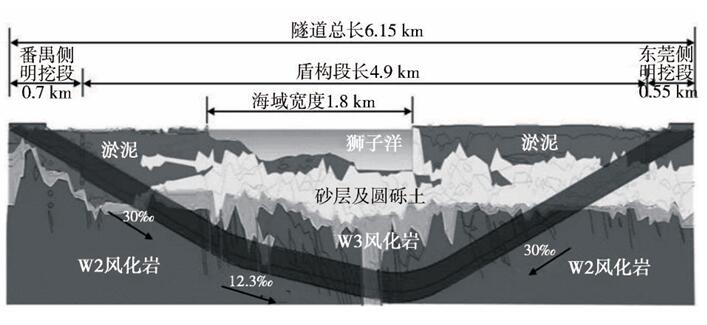
图4 狮子洋隧道地质纵断面
(4)济泺路穿黄隧道
济泺路穿黄隧道是在黄河兴建的第一条超大直径盾构隧道为穿越地上悬河的公路轨道合建的交通隧道,被誉为“万里黄河第一隧”。盾构掘进区间段位于土-岩界面附近,穿越断面内为全断面硬塑性粉质黏土夹杂大量钙质结核(图5),其钙质结核强度最高可达90MPa,在盾构施工过程中极易造成刀具磨损和泵浆管道堵塞。
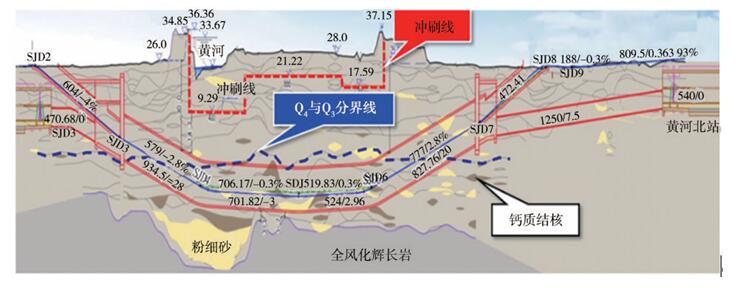
图5 济泺路穿黄隧道地质纵断面
(5)青岛胶州湾第二海底隧道
青岛胶州湾第二海底隧道位于花岗岩地层中(图6),主要采用盾构法与钻爆法相结合的方式进行施工,沿线存在活动断裂带、含水断层等不良地质,在施工过程中易发生涌水、塌方事故,且易受到地震影响。
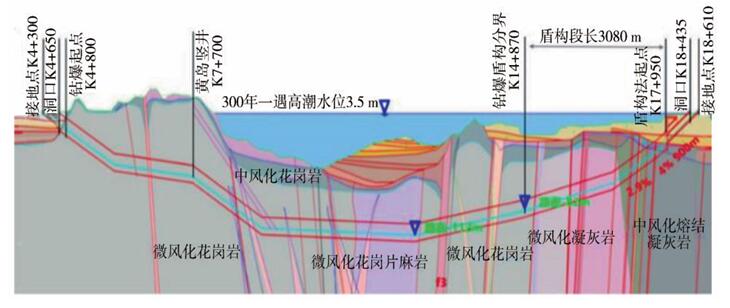
图6 胶州湾第二海底隧道地质纵断面
3.2 水下盾构隧道面临的挑战
在水下盾构隧道工程的修建过程中,存在多方面的挑战,其中主要包括地质复杂性、高承压、易受地震影响以及高耐久性要求。这些外在因素增加了水下盾构隧道设计和施工难度。
(1)地质复杂性
随着我国水下隧道的发展,将面临更加复杂的施工地质条件。目前高磨蚀性砂卵石地层、高黏粒粉质黏土地层、高水压强渗透性地层、江底富含沼气地层、密集孤石群地层、长距离地下断层破碎带、极软极硬复合地层、高烈度地震区活动断层等复杂地质环境已经成为现阶段盾构隧道施工面临的难点。
(2)大直径、高水压
为了满足不断增长的交通需求,我国盾构隧道正朝着大直径、高水压、长距离等方向发展。这一发展趋势将对盾构装备的选择、大直径刀盘的合理配置以及掘进过程中的变形控制等方面产生重要影响。同时,在盾构掘进过程中,隧道渗漏问题也将对大直径水下隧道的施工质量和安全性产生影响。
(3)易受地震影响
我国渤海湾、台湾海峡、琼州海峡等沿海区域,位于全球三大主要地震带之一的环太平洋地震带,地震活动频繁。在地震活跃地区,隧道结构的损坏可能导致严重的社会和经济后果。尽管一般认为隧道比建筑物更不易受地震影响,但在某些大地震中,这些结构仍然会遭受严重的损坏。特别是在埋深浅、断面大、周围地层松软、水下环境复杂的情况下,隧道破坏的可能性会增加。
(4)耐久性要求高
水下隧道结构设计使用寿命一般为100a,但部分隧道仅在15~20a的使用周期内就出现了管片劣化和钢筋腐蚀等问题。在高水压环境下,水中离子更容易渗入混凝土结构,逐渐侵蚀混凝土保护层,导致隧道结构的钢筋锈蚀,从而使管片劣化(图7)。
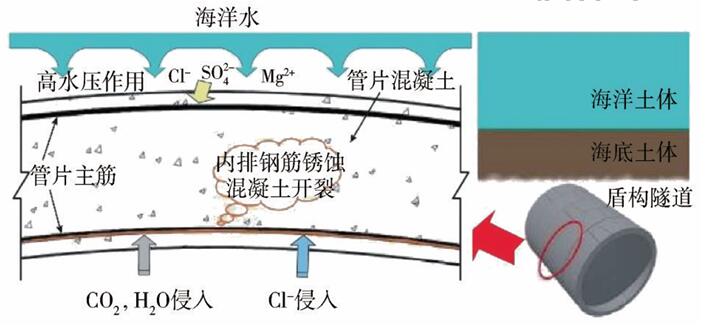
图7 盾构隧道管片结构的工作环境示意
4 水下盾构隧道安全建造技术
4.1盾构机和掘进参数优化
4.1.1 刀盘刀具与冲刷系统的综合优化
水下隧道常位于富水软土地层和砂层中,软土地层中的黏土及粉质黏土的细颗粒含量高,盾构刀盘刀具极易淤积泥饼,导致刀盘刀具的切削效率降低。因此,目前在水下隧道施工中会对盾构刀盘刀具和冲刷系统进行综合优化设计,如图8所示。陈健等针对苏通管廊越江隧道工程,提出了刀盘冲刷喷头数量和位置的优化设计方案。此外,叶家民等提出了优先选用开口率较大的刀盘以及合理配置刀具的优化方法来改善结泥饼现象。这些综合优化方案有助于应对水下隧道施工中的挑战,提高刀盘切削效率。
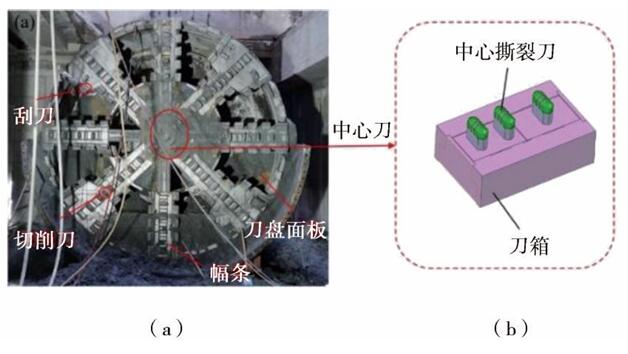
图8 刀盘结构示意
4.1.2 泥浆成膜的配比调节
水下盾构隧道所处地层具有高渗透性的特点,盾构泥浆极易渗漏到周围土体中,难以在开挖面形成致密泥膜保护层,导致开挖面产生失稳破坏。因此,盾构泥浆配比对水下盾构隧道施工掘进具有重要意义。研究表明,泥浆粒径对形成泥膜有重要影响,当典型粒径d85大于0.5倍地层平均孔径D0时可形成稳定泥膜。韩晓瑞等以南京长江隧道的高渗透性砾砂地层为例,采用在膨润土与天然黏土的混合泥浆中添加2‰的增黏剂来调节泥浆黏度的方式解决地层渗透性高的问题(图9)。林钰丰等通过自行设计的泥浆渗透装置,分析了地层渗透系数、泥皮厚度、泥浆滤失量三者的关系以及成膜的判断方法。这些研究有助于确保开挖面的稳定性。未来可通过智能算法实现对盾构泥浆的智能调控,调整其中膨润土、粉土、增黏剂以及粗颗粒等材料的含量,实现泥浆密度、黏度和含砂量等基本性能参数的自动调整,从而更好地适应复杂多变的水下地层条件。
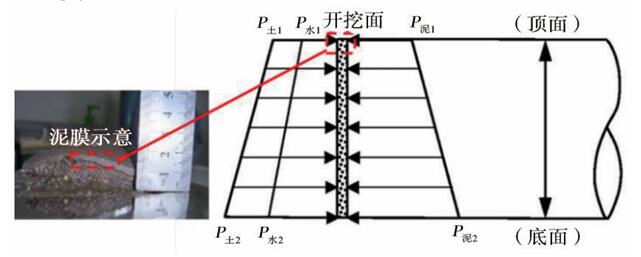
图9 泥水盾构开挖面泥膜示意
4.1.3 掘进参数控制
在水下复合地层中,盾构掘进参数的选择是一个难题。王国安等以汕头海湾隧道工程为例,针对水下复合地层总结出“控制贯入度为主、转速为辅,严控刀盘转矩波动”的掘进参数控制原则。余国武分析了小半径曲线隧道掘进中总推力、推进速度、刀盘扭矩、刀盘转速、土舱压力、贯入度等6个重要掘进参数与地层的相关性。此外,当水下隧道的两岸受到接收条件限制和约束的时候,盾构隧道不得不采用小曲率半径的设计。此时,盾构掘进易出现姿态失稳。盾构掘进路径并不总是与理论设计隧道轴线保持一致,如果盾构姿态偏差过大,可能会导致盾构尾部变形、管片破裂、盾构机翻转等问题。由于刀盘直径略大于盾体直径,开挖区域与盾体外表面之间存在一定的间隙(图10)。顶推千斤顶控制或曲线掘进不精确通常会导致盾构掘进过程呈现“蛇形”运动的趋势。“蛇形”运动的幅度越大,施工的安全性越低。合理的盾构掘进参数控制是保障水下盾构隧道建造的关键。
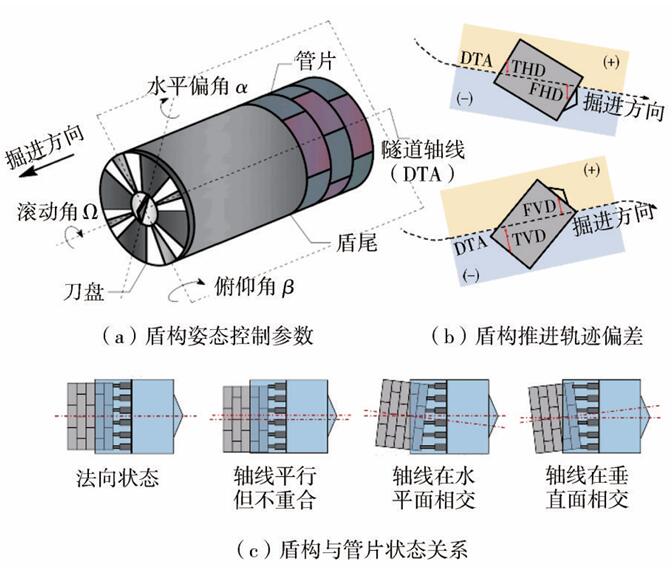
图10 盾构姿态与轨迹示意
目前,用于控制盾构姿态的自动控制系统仅基于现有的工程经验,没有可靠的理论支持。在工程中主要通过盾构操作员经验控制,但传统的人工姿态调整存在滞后性和不准确性。范文超等在汕头海湾隧道工程中采用BP神经网络方法构建相关性预测模型,实现了盾构在水下掘进从地质参数到掘进参数的量化预测。黄靓钰等以长沙地铁3号线盾构穿越水下岩溶段为工程依托,提出了用于指导水下岩溶段盾构工程施工的掘进参数模型,有效避免了涌水、涌泥等事故的发生。Shen等以十字门隧道工程为例,提出了一种将小波变换(WT)融入随机森林模型(RF)的姿态和运动轨迹实时预测框架(图11),并成功应用于盾构施工中。
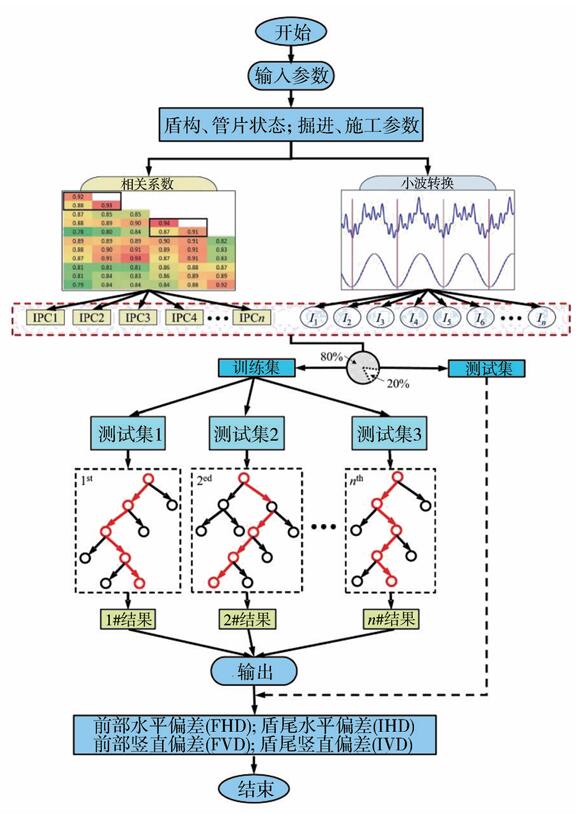
图11 盾构姿态控制和运动轨迹的实施框架
此外,国内外学者已进行了多项研究,探讨了预测盾构隧道施工姿态和移动轨迹的方法,如卡尔曼滤波理论、鲁棒理论、模糊控制理论、PID反馈控制以及多种机器学习算法等。但目前研究中建立的盾构姿态理论模型大多基于简单的力学模型,对土体力学特性的描述相对不准确。且深度学习算法在姿态控制方面的应用较少,仍处于起步阶段。因此,实现盾构姿态的智能预警是未来水下盾构隧道施工的必然发展趋势。
4.2 水下盾构隧道防水技术
水下盾构隧道相较于陆域盾构隧道,在施工过程中面临更为严格的变形控制要求。这是因为水下隧道的高水压环境,细小的变形破坏都会导致严重的渗漏水问题。
由于水下盾构隧道长期受高水压的浸泡和腐蚀,接缝在防水体系中相对薄弱。管片破坏以受弯开裂为主,弯矩主要取决于竖向土压、侧压和地层抗力的差值。因此,盾构隧道一般采取错缝方式进行拼装。弹性密封垫老化、管片错台、隧道不均匀沉降等会弱化管片接头位置的防水能力,是盾构隧道接头位置处发生渗漏的主要原因。刘印等对上海地铁隧道渗漏水进行了统计,认为接头是盾构隧道最主要的渗水路径,接头渗水占总渗水点的80%~90%。
目前,我国盾构隧道接缝防水主要有4种体系,如图12所示。为了适应水下盾构隧道在大直径、高水压、复杂地质条件下不断变化的趋势,国内盾构隧道管片接缝防水体系正经历着不断的演变。目前,主流的盾构隧道管片受限于管片厚度,绝大多数采用单道弹性密封垫。然而,现有的单道密封垫防水体系在满足超大直径深埋盾构隧道接缝防水需求方面存在局限性。

图12 目前我国盾构隧道主要的接缝防水体系
目前针对盾构隧道的防水体系加强主要体现在两个方面,一种是研发新型的接头来增加接缝的密闭性。薛光桥等尝试采用一种新型的承插式接头(图13)来实现管片之间的连接,对该新型承插式接头的管片接缝防水性能开展了研究,确定了适合水下盾构工程施工的防水体系。
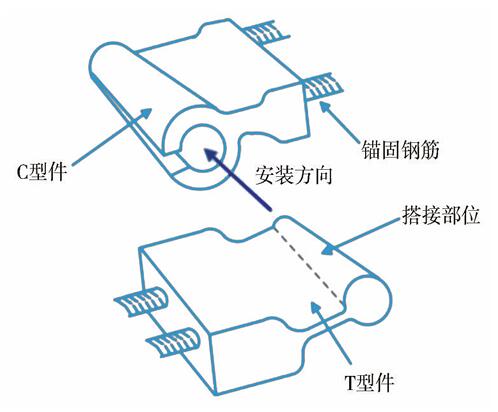
图13 新型插销式连接件
在盾构隧道的防水体系中,密封垫断面的结构形式是重要组成部分。接缝处的渗水不仅与结构变形有关,还跟密封垫的性能有很大关系。所以另外一种途径就是针对盾构隧道接头防水体系中的橡胶密封垫进行改良。赵明等以南京纬三路过江隧道工程为背景,利用自主研发的三向加载防水性能试验系统,研究并提出了更为优化的密封垫断面形式,以提升防水性能和整体结构性能。谢宏明等以苏埃海底盾构隧道为背景,通过接缝防水试验,优化了密封垫及沟槽截面尺寸(图14),提出了应对强震作用的大直径盾构隧道管片环缝防水的合理形式。
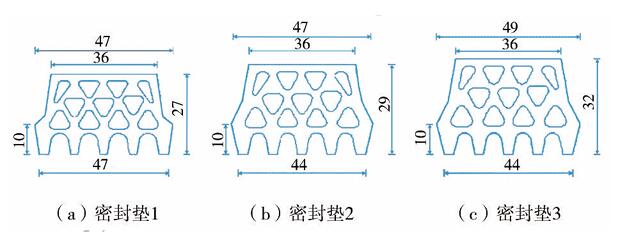
图14 密封垫截面(单位:mm)
肖明清认为过大的错台量是导致接缝处防水失效,进而引发渗水的主要原因。随着水下盾构隧道的不断发展,水下高水压环境对隧道接缝处的弹性密封垫防水密封提出了更高的要求。对于高水压条件下的大直径盾构隧道,可采用双道密封垫的设计。在未来的水下盾构隧道工程的建造过程中,不仅仅考虑建造过程中的防水问题,还应该进一步关注灾变后的防水体系韧性。
4.3 水下盾构隧道抗震设计
盾构隧道的抗震设计是提高盾构隧道抗震能力的基础。目前研究表明,在地震作用下隧道结构仍会受到一定程度的破坏(图15)。
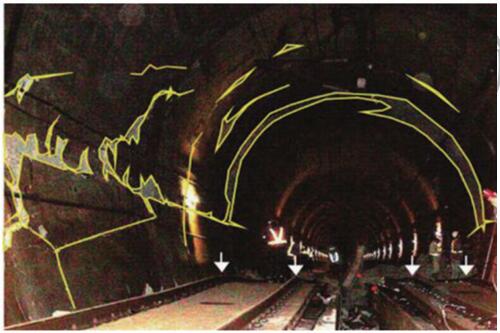
图15 日本Uonuman隧道地震损坏现场
4.3.1 理论计算方法
目前,盾构隧道的抗震设计主要分为隧道横向与纵向抗震设计。隧道横向抗震设计常采用震度系数法(静力法)。该方法通过考虑结构物在地震作用下的惯性力来评估地震效应,最初用于地面结构,后于20世纪50年代引入地下结构抗震分析。该方法简单易行,只需场地峰值加速度即可计算,得到了广泛使用。然而,也存在一些不足,如侧向土压力难以准确获取,对于深度较小时计算内力偏低,而在埋深较大时计算的内力偏高。此外,理论计算无法考虑土体与结构的相互作用。
隧道纵向抗震计算方法根据地下结构随地层变形的特点,将隧道变形模式划分为纵向拉压、纵向弯曲和横向剪切变形等。目前,盾构隧道纵向抗震分析模型主要分为两种:第一种是以有限元算法为基础的离散化模型,其中梁单元模拟管片环,弹簧单元模拟环缝,最后将所有单元串联成整体模型。尽管在理论上较为精确,但由于计算单元过多,求解过程不稳定,不利于工程实际应用;第二种是基于理论解析的连续化模型,将隧道在横向视为均质圆环,纵向以刚度等效的方法将由接缝和管片组成的盾构隧道等效为具有相同刚度和结构特性的均匀连续梁。这种方法概念明确,计算简单,但结果只能反映隧道内力以及绝对位移。目前抗震设计理论方法主要还是针对陆域隧道,无法考虑水下隧道的水-土耦合效应,鲜有理论方法能单独考虑水下盾构隧道的抗震设计。
4.3.2 模型试验方法
常重力加速度下的大型振动台模型试验成为了水下隧道抗震设计验证的重要手段之一。这种方法能全面地模拟地震作用下隧道结构的响应,并能考虑到水-土耦合作用。袁勇等以港珠澳大桥沉管隧道和上海沿江通道盾构隧道为背景,开展了超长水下隧道的多点振动台模型试验。宁茂权等以福州地铁5号线沿闽江段盾构隧道中细砂地层为试验对象,开展了基于正交设计的9种不同工况的振动台试验,探究了闽江砂土液化特性。崔杰等采用振动台试验分析了上覆水对沉管隧道地震响应的影响。本文研究团队对十字门水下隧道结构抗震进行了振动台试验研究,振动台模型箱装配流程如图16所示,试验成功模拟了水下环境下盾构隧道的地震响应。
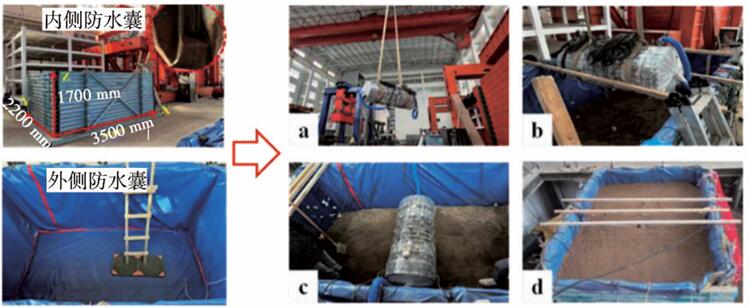
图16 大型水下盾构隧道振动台试验布置
近年来,隧道工程向着大直径、长距离、多场多相耦合方向发展,水下隧道模型试验已成功实现高水压加载的稳定性。但是目前振动台试验的相似缩尺效应仍是一个重大难点。
4.3.3 数值计算方法
与模型试验相比,数值计算研究投入较少,并且能够更详细地研究地震作用下地下结构与饱和土的动力相互作用,同时还能弥补试验中的模拟缺陷。因此,采用数值方法对水下盾构隧道抗震研究相对较多。吴宏等针对水下穿越不同密实度的饱和砂土地层的盾构隧道地震响应进行了数值分析,认为地震液化对隧道结构有重大威胁,且位于抗液化能力不同的地层交界处的盾构隧道段更易发生严重的地震破坏,但研究未考虑上覆水的影响。李思明等为探究盾构隧道穿越刚度变化地层的抗震安全性,建立了考虑土-岩变化地层特性的盾构隧道-地层三维有限元模型。陈炜昀等基于有限元软件研究了海底隧道在不同地震动输入、不同地震激励方向及不同上覆水深条件下的隧道响应规律(图17)。但这些研究多关注隧道的整体结构地震响应,忽略了盾构隧道节点的地震变形影响。

图17 海水-海床-隧道耦合模型与隧道监测点分布示意
水下隧道的地震作用是一个突发性事件。在地震发生前,水下隧道在腐蚀离子环境作用下,整体的刚度和性能可能早就发生了退化。例如橡胶老化、螺栓锈蚀、混凝土衬砌碳化等问题,目前大量的抗震研究中少有考虑这种因素。水下隧道的抗震设计需要进一步考虑水下隧道劣化影响。
5 水下隧道智慧运维技术
5.1 水下隧道结构耐久性监测技术
随着水下隧道服役时间的延长,氯离子侵蚀对结构的危害会逐渐增加(图18),外部水压越大,海水渗透深度越深,在管片接头局部区域的氯离子侵蚀会呈现不均匀分布。近年来,高水压隧道衬砌结构的劣化机理和耐久性的影响已成为亟待解决的问题。何 川等从设计施工、环境侵蚀、突发自然灾害及突发事故灾害4个方面,分析了我国水下隧道衬砌结构安全所面临的问题。韩兴博等指出在役盾构隧道管片衬砌合理的承载能力劣化模型是隧道结构耐久性评价及科学养护的基础。
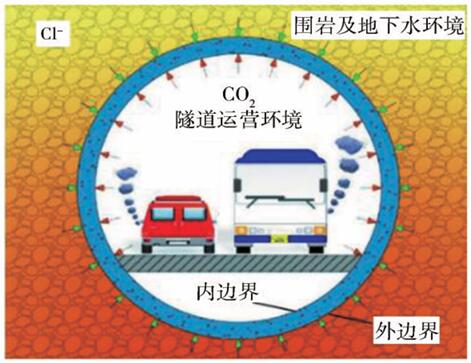
图18 隧道侵蚀环境示意
为探索隧道结构耐久性,可通过了解混凝土中的氯离子电位在温湿度耦合作用下的变化规律来实现。如图19所示,钢筋腐蚀是一个电化学过程,因此电化学测量是反映其本质过程的有力手段。
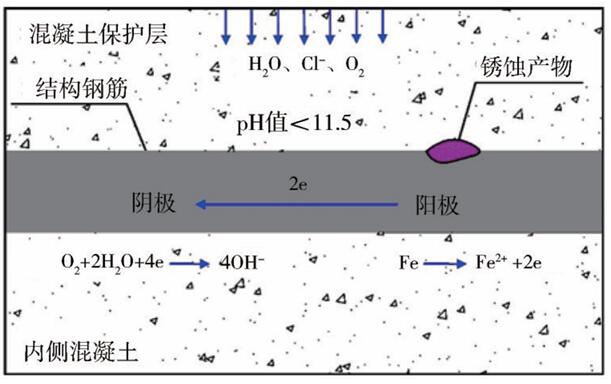
图19 混凝土结构电化学腐蚀示意
常见的电化学方法有半电池电位法、电化学阻抗谱、极化曲线法等。此外,新型的钢筋锈蚀监测技术也不断涌现,例如基于光学原理和电磁学原理的钢筋锈蚀监测。图20展示了基于这些原理的多种传感器,然而这些传感器在工程上应用还存在各种不利条件。
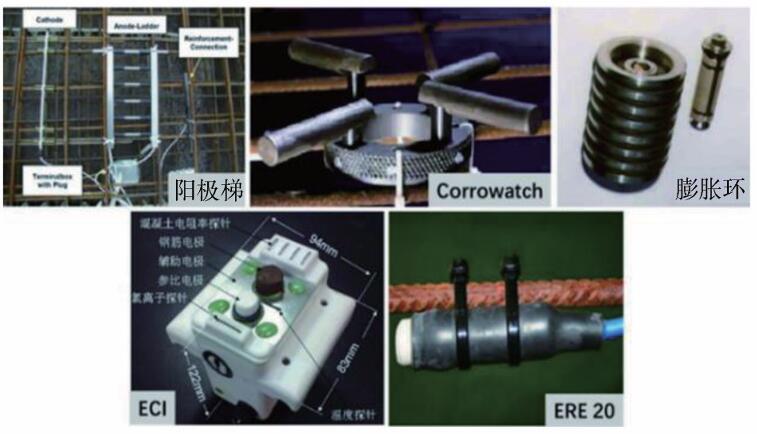
图20 各式耐久性监测传感器
尽管已有一些关于地下隧道结构中氯离子腐蚀机理的研究成果,但由于缺少水下盾构隧道耐久性的工程经验,对水下盾构隧道耐久性的研究仍显不足。传统的传感器在复杂的锈蚀环境下难以长期稳定工作。因此,针对某水下隧道工程,崔宏志等研发了适用于高水压环境下的新型温湿度传感器(图21),其保护装置具有良好的隔水性和透气性,可为传感器提供安全的工作空间,有效延长了传感器的寿命,同时便于对周围环境进行检测,其成功应用情况如图22所示。通过物联网云平台集成水下盾构隧道结构耐久性运维监测平台系统,保障了监测数据的实时更新和安全存储,推动了结构耐久性监测在工程应用上的发展。
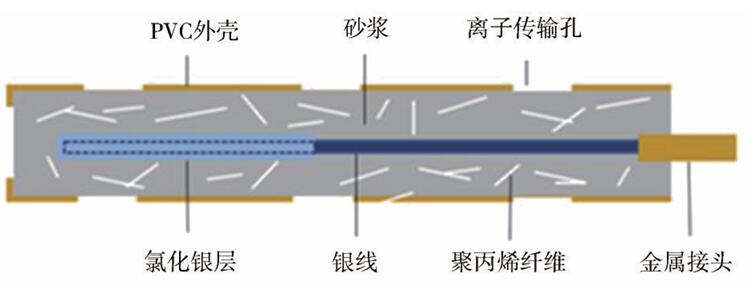
图21 自行开发设计的耐久性监测集成传感器
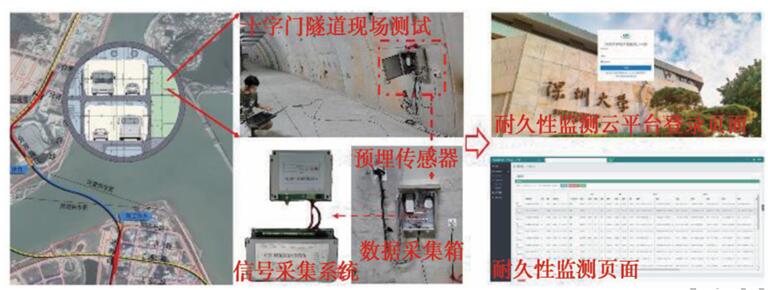
图22 水下隧道工程耐久性监测过程
5.2 水下隧道结构质量检测技术
5.2.1 隧道结构表观质量检测
在隧道运维过程中,由于设计和施工质量缺陷、侵蚀环境、突发自然灾害及事故等,隧道衬砌结构可能出现不同类型和程度的劣损和病害。盾构管片拼装也面临质量控制的挑战,易出现管片错位、变形等问题。
(1)传统人工检测方法
传统的隧道检测主要通过在隧道衬砌关键位置设置检测点,采用全站仪、经纬仪以及传感器等采集几何变形数据(图23)。虽然这种单点式的数据采集模式能够满足施工要求的数据精度,但存在仅在少数点位上测量难以准确反映整个隧道断面的变形、监测点需受保护且人工检测效率低等问题。
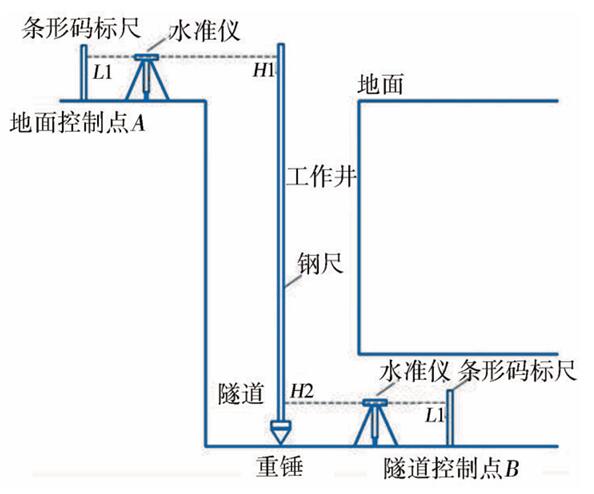
图23 高程导入隧道测量示意
(2)三维激光技术
三维激光扫描是一种以激光扫描仪为主要检测设备的测量方式(图24),以非接触的形式对隧道衬砌表面进行高速扫描。周鸣亮等基于移动激光扫描技术提出了一种集隧道结构变形检测、衬砌表观病害量化以及检测结果三维可视化于一体的运营期隧道结构病害自动化检测方法,并结合深度学习网络框架对衬砌表面渗漏水及混凝土剥落病害进行了自动化识别与量化。但这种技术在面对大直径隧道工程时,整体结构的全面扫描需要花费较长的时间,并且该方法主要获取结构的几何信息,对于颜色信息的获取相对有限。在需要更详细的视觉信息时,则需要额外的摄像头或传感器。
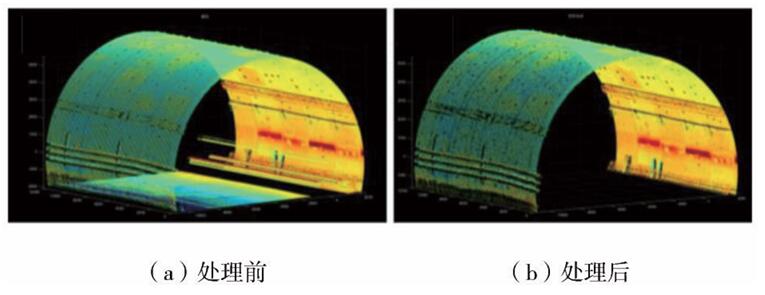
图24 激光扫描轮廓预处理结果
(3)摄像测量检测技术
为解决传统人工检测和三维激光扫描的不足,在十字门隧道中引入基于三维实景和全景图的管片拼装质量检测技术(3DReality and Deep Zoom Im⁃age, 3DZI),该技术融合了三维重建和全景展开图技术,可提高检测准确性和效率,如图25所示。
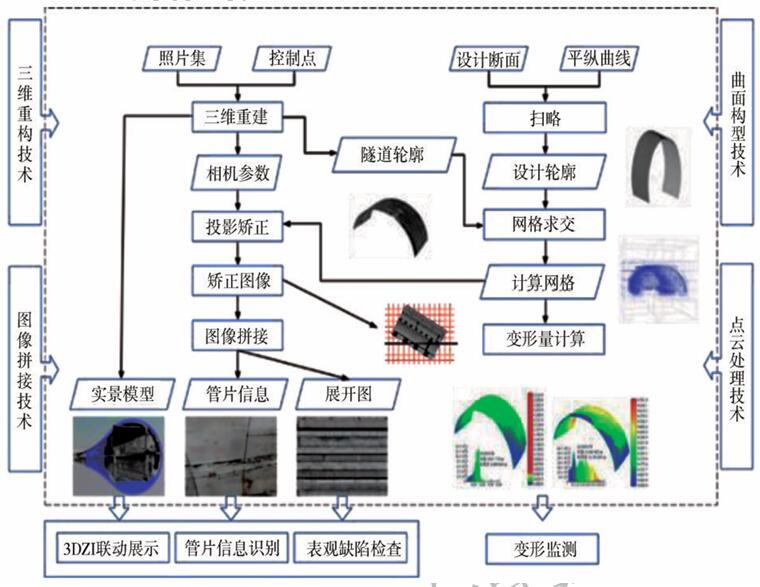
图25 3DZI检测技术框架
通过3DZI技术对某水下隧道的开挖和支护质量进行三维实景重建(图26),主要包括管片信息编录与识别、表观缺陷检查、基于三维实景与全景展开图的现场实体重现与辨识以及变形监测。在未来可进一步在时间维度上进行扩展,通过不同时序的拍摄结果建立动态化的实景BIM模型,全面监测隧道施工质量和过程。可在运维阶段记录衬砌结构病害的发展劣化过程,为隧道长期性能及结构寿命的评估提供数据,推动隧道全寿命周期信息管理的实践。
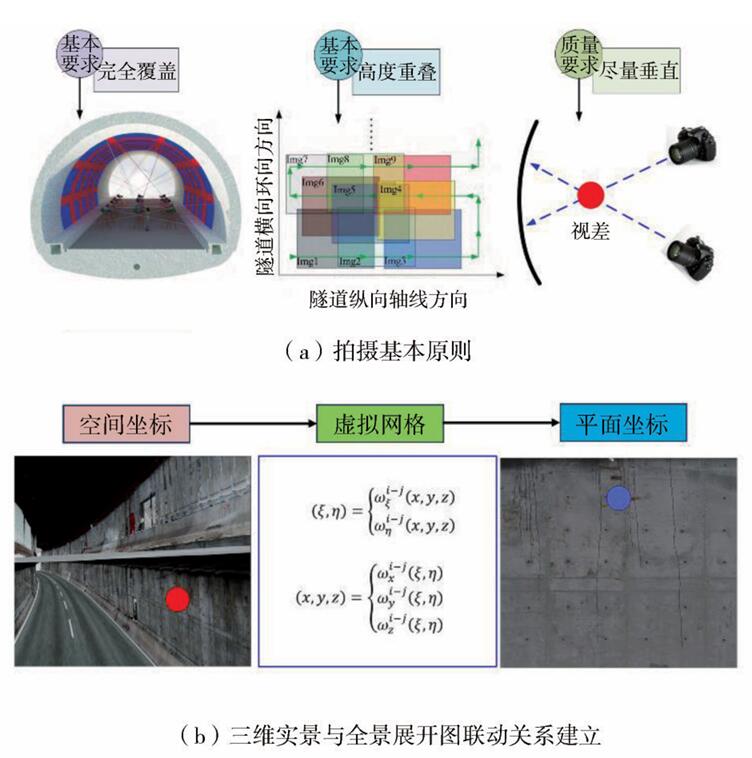
图26 三维实景重建过程
5.2.2 隧道结构隐蔽病害检测
在盾构管片施工过程中,由于盾构超挖、注浆压力不足和浆液凝固收缩等,可能出现背后注浆层不密实,引发背后空洞、管片开裂和渗水等问题,从而降低地铁隧道结构的安全性与耐久性。这些问题难以通过表观检测技术进行识别与分析,通常需要依赖各种无损检测技术,如电磁波、超声波、热成像法、冲击回波法等。
(1)超声波检测法
超声波检测法是利用声发生器产生超声波,传输至隧道衬砌内部,再用声波接收器来接收反射的声波信号的方法。然而,在水下环境中,该方法容易受到环境噪声的干扰,降低了检测的准确性。
(2)红外热成像检测
红外热成像检测是一种利用电磁辐射热温度场来识别隧道衬砌缺陷的方法,对于水下环境的检测精度受到环境温度的影响。
(3)冲击回波声频法
冲击回波声频法(ImpactAcoustic Echo,IAE)是一种基于音频的非接触移动式工程无损检测方法,综合了弹性波冲击回波法和敲击法的优点(图27)。然而,在水下隧道环境中,同样容易受到噪声的干扰,影响其检测的准确性。
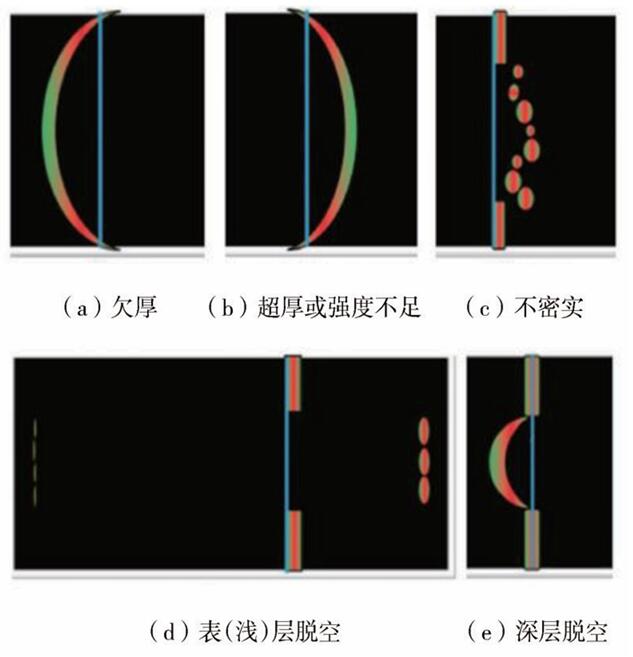
图27 常见质量缺陷IAE解析图
(4)探地雷达法
基于电磁波的探地雷达技术应用最为广泛。探地雷达技术是一种通过调制的高频电磁波实现对非均质体内目标体定位与识别的方法,具有定位准确、速度快、灵活性高和探测精度高等特点。探地雷达法的原理是基于时域有限差分法,使用Yee提供的时域有限差分法建立正演模型,通过实测电磁波数据对隧道结构电学特性进行标定,从而获取结构内部和注浆缺陷的典型电磁波信号特征,如图28所示。
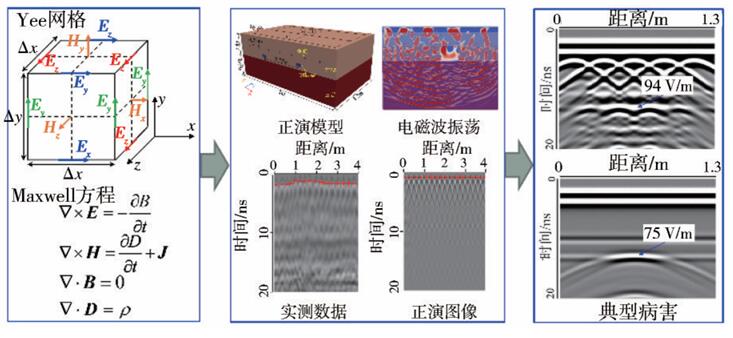
图28 探地雷达隧道结构病害检测原理
与小直径盾构隧道相比,超大直径盾构隧道的管片厚度更大、管片内钢筋分布更为密集,这会给结构隐蔽病害检测造成极大的困难。李康等以江阴靖江过江盾构隧道为工程背景,研究了超大直径盾构隧道双液同步注浆的填充效果。研究团队对某水下隧道进行了探地雷达检测,使用不同的测线间距对隧道模型的脱空最大高度和脱空长度进行评估,如图29所示。通过对实测数据的比对,成功识别了管片的钢筋、孔洞、接头等部件的电磁信号特征。
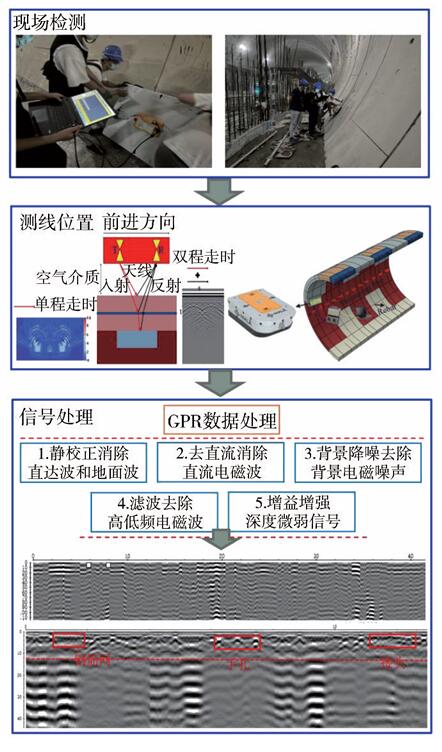
图29 探地雷达检测过程
然而,需要注意的是探地雷达法容易受电磁干扰,且钢筋对其影响较大。未来可通过优化探地雷达参数,并结合人工智能和机器学习,实现对实测数据的快速智能分析,从而提高隧道结构健康状况评估的效率和准确度。
5.3 隧道智能运维系统
在新兴现代信息技术(包括数字孪生、物联网、人工智能、大数据等)迅速发展的背景下,建筑行业迎来了高质量发展的机遇,并推动了建筑运维管理的智能化转型和升级。刘伟浩等基于光纤传感技术、LabVIEW虚拟仪器技术和数据库技术,提出了用于济南隧道穿黄段盾构法隧道施工期及运营期安全监测的大直径水下盾构隧道综合监测系统。陈虹宇等建立了基于三维全景监测技术的运营地铁隧道结构健康监测系统,对武汉地铁3号线跨江段进行了监测,使用MVC(模型视图控制)以及Struts框架等相关Web框架搭建技术(图30),研发了一套完整的运营地铁隧道结构健康监测系统软件。然而,传统的以隧道监控为主、重要结构信息实时采集为辅的运维管理方式已经不能满足现今的运维需求。
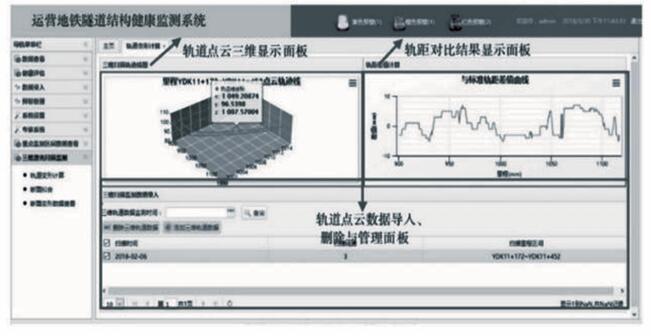
图30 隧道健康检测系统点云变形计算界面
于建基于Python编程语言和大数据,构建可实现工程监测、综合预警、可视化、参数反演及实时动态分析等功能的自动化监测预警系统(图31)。该自动化监测预警系统可对施工过程中土压力、位移、渗透水压等进行实时监测。然而,隧道的监测往往会产生海量的数据,异常值的判断需要人工进行,导致效率低下。
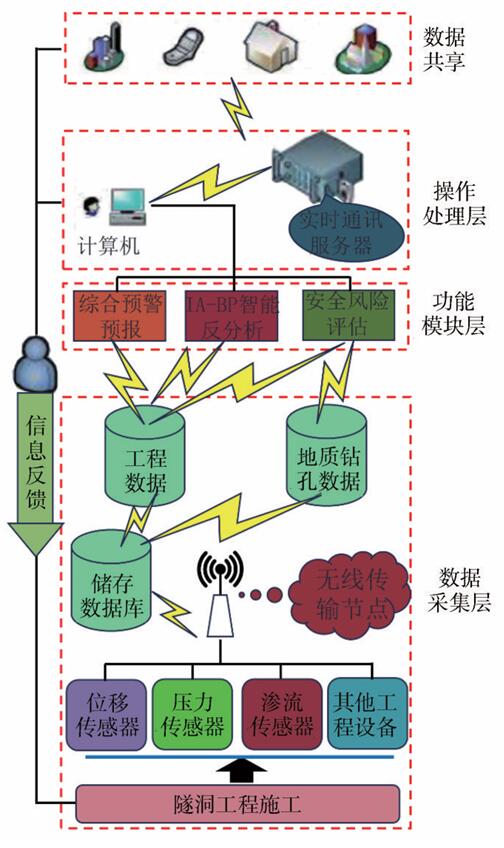
图31 预警系统结构
隧道是隐蔽工程,也是城市的生命线工程之一,具有施工复杂、运维管理难及安全性要求高等特点。王 华等为有效提高隧道管养效率,采用Spring Boot+MyBatis Plus 架构、应用分布式的Redis和MySQL部署开发技术研发隧道结构健康管理大数据平台,并从设备管理、病害管理、大数据智能分析处理等方面进行现场应用,实现了隧道表观病害的智能识别,减小了病害识别方面对人工的依赖。但无法对隧道的结构隐蔽病害进行有效管理与分析。杨建平等在武汉长江隧道布设了健康监测系统,获得了水下盾构隧道正常运营期(2013年9月~2020年6月)关键断面拱顶管片应变及接缝响应规律,并分析季节变化的影响。尤其是在水下隧道,面临着更高的运维风险。在十字门隧道现场(图32),通过布置管片接头变形监测系统和结构变形监测等系统,实时采集并自动上传监测平台。
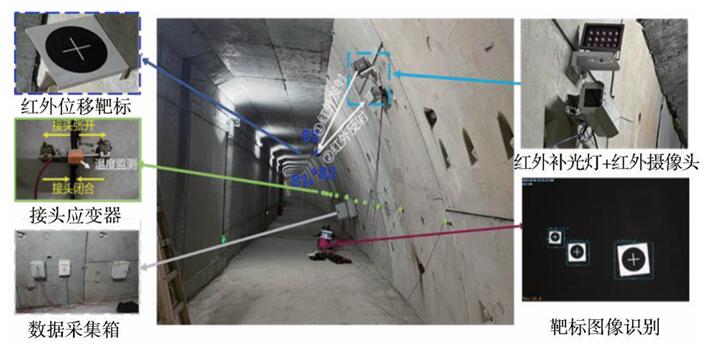
图32 安全智慧运维系统监测现场布置
基于工程监测云平台的隧道灾害信息管理平台(图33),可实现对振动、应变、沉降、耐久性、隐蔽病害等多种数据的全面分析和监测,为隧道工程的安全管理和运营提供了强大的技术支持,确保水下隧道的安全可靠运行。

图33 某水下隧道安全智慧运维系统监测界面
6 结论与展望
(1)水下盾构隧道建造需综合考虑各种复杂因素,包括地质状况、水文环境、地震威胁以及结构耐久性等。针对这些挑战,选择合适的施工方式、采用先进的技术和管理手段,以确保水下隧道的安全性和可靠性,是当前水下隧道建设亟需解决的问题。
(2)水下盾构隧道施工面临效果不确定、掘进参数难选择、掘进姿态难控制等问题,现有研究的盾构掘进控制模型大多基于简单的力学模型。综合刀具优化和泥浆合理配比以及掘进参数控制的盾构智能掘进是未来水下盾构隧道施工的必然发展趋势。
(3)与陆域盾构隧道相比,水下盾构施工面临更为严重的渗漏水问题。目前采用的单道密封垫防水体系在满足超大直径的盾构隧道防水需求上存在一定局限性。为解决这一问题,需要采用结构更加优化的密封垫进行防水处理。未来的研究还需关注灾变后防水体系的韧性,以提高整体应对灾变情况的能力。
(4)地震液化对水下盾构隧道结构构成潜在威胁,目前,抗震设计主要考虑隧道的横向和纵向抗震性能。现有的振动台试验的相似缩尺效应仍然是一个需要克服的难点。在不同地层条件下,盾构隧道的地震破坏程度存在差异。同时,水下隧道的抗震设计需要进一步考虑结构劣化影响。
(5)隧道结构在高水压环境下易导致混凝土结构劣化和钢筋锈蚀。目前存在多种基于电化学、光学和电磁学等原理的耐久性检测技术。但这些技术在复杂水下环境中表现有限,传感器难以长期稳定工作。未来需要研发性能更好、寿命更长的检测设备。
(6)盾构管片结构劣损和病害源于设计施工缺陷、环境侵蚀、自然灾害等因素。现有技术对结构病害检测时效低,难以快速准确识别,易受外部环境干扰。未来可考虑建立全寿命周期信息管理的动态实景BIM模型,记录结构病害的发展,为水下盾构隧道性能及寿命评估提供数据。
(7)传统以监控为主、实时采集为辅的运维管理方式已显得滞后,需要更加智能、全面、实时的解决方案。未来可考虑结合数字孪生、物联网、人工智能等新兴技术,构建更为智能化的隧道监测和管理系统。
未来水下盾构隧道的建造与运维技术将朝着更加智能、全面、实时的方向发展,通过复杂多变隧道工程环境的自适应处理、多模态监测数据的整合与处理、长周期的耐久性监测、从设计到建设再到运营的全寿命周期管理等方式,从而提高隧道工程的安全性和可靠性,为城市基础设施建设提供更先进和有效的解决方案。