0 引言
全断面岩石隧道掘进机(TBM)由刀盘、主驱动、推进、支撑等系统构成,是一种集掘进、出渣、支护于一体的大型隧道施工装备,通过协同作业实现隧道的一次成型。TBM 作为现代隧道工程的核心装备,具有施工速度快、安全性能好、环境影响小、成洞质量高、地质适应性强等优点,已广泛应用于国内外水利水电、市政、铁路、公路、矿山等隧道工程,并且随着自主设计制造水平的提升,迎来了大规模推广应用。
然而,TBM 施工主要以人工操作为主,掘进参数的选择依赖于主司机的驾驶经验,操作精度受人员反应速度、经验、身体状况、情绪等个人因素影响较大,施工质量难以保证。且一旦遭遇地层变化或复杂地质条件,操作人员如果判断不及时,没有做出掘进方案和控制参数的有效调整,则极有可能导致掘进不平稳、坍塌、卡机等施工事故,甚至引起机毁人亡的灾难性后果,造成严重的经济损失。
随着TBM 掘进不断向大埋深、长距离、超大断面、超小直径发展,隧道施工环境日益复杂,施工条件也越来越差,现有掘进机技术水平已不能满足隧道快速、优质、安全的施工要求,TBM 自动化与智能化逐渐成为隧道工程领域的重大技术挑战。
近年来,越来越多的专家学者对隧道施工领域的智能控制技术开展研究工作。例如: 张娜等、徐剑安等基于数据挖掘和人工神经网络等智能技术研发了一套TBM 掘进参数智能控制系统,通过建立岩机信息感知互馈模型实现TBM 掘进参数预测和掘进状态评价;赵冬星提出了一种基于RBF 神经网络的掘进机智能驱动控制系统,解决了在复杂地形条件和截割阻力多变情况下固定进给速度无法满足掘进机驱动控制要求的问题;王飞等设计了一种基于XGBoost 预测模型的TBM 操作参数智能决策方法,通过XGBoost 算法预测、判断围岩级别,并建立专家模型获取围岩参数与操作参数之间的关联,实现对TBM 操作参数的智能决策;杨耀红等建立了掘进参数时序预测模型LSTM-GRU,通过向原始数据和误差学习的双学习机制,精准预测不同围岩等级下TBM 的掘进速度、总推力、刀盘转速和刀盘转矩;谭忠盛等提出了一种TBM 智能辅助决策技术,基于以掘进速度和刀具寿命为目标的多目标智能算法对掘进参数进行优化,并提出了掘进参数、支护方案、卡机应对措施等辅助决策方法;段存虎研究了掘进机的智能故障诊断系统、振动频谱分析预测系统和远程智能控制系统,通过传感器对液压系统、电机等重要部件进行监控分析,并利用无线通信和视频监控进行远距离遥控;张洁基于TBM 施工性能掘进参数和围岩总评分建立了TBM掘进施工预测模型,并对新疆某超长隧洞标段的5 个关键施工性能参数进行预测分析;陈祖煜等分析比较了用知识驱动和数据驱动2 种不同方法分别获取的贯入指标对智能预测围岩参数和掘进参数的影响,认为将2 种方法结合可以丰富TBM 领域机器学习的输入参数,并获得更好的预测成果。
综上所述,目前对TBM 智能系统的研究多集中于对围岩状态和部分掘进参数的预测,该类方法仅能辅助司机决策,尚未涵盖TBM 驾驶过程中泵站启动、设备启动、纠偏调向、自动换步等关键环节,因而无法实现真正的无人自主掘进。本文提出一种TBM 自动巡航系统,基于大数据与人工智能技术,实现从自主围岩识别、参数自适应调节、自动纠偏调向到自动换步的TBM 全流程自动化控制。
1 TBM 自动巡航系统总体方案设计
1. 1 系统架构设计
TBM 自动巡航系统采用分层式架构,集成了感知层、决策层与控制执行层,实现掘进全过程智能化自主运行。系统通过感知层多源传感器实时采集掘进参数、各油缸传感器数据与设备位姿数据等,传输至决策层进行融合处理与状态判别。决策层依据围岩识别结果与导向系统反馈,自适应生成掘进参数调整策略与纠偏、换步等指令。控制执行层依据指令实现推进速度、刀盘转速等参数的闭环调节,并完成纠偏调向和自动换步等功能的协同控制。TBM 自动巡航系统架构如图1 所示。
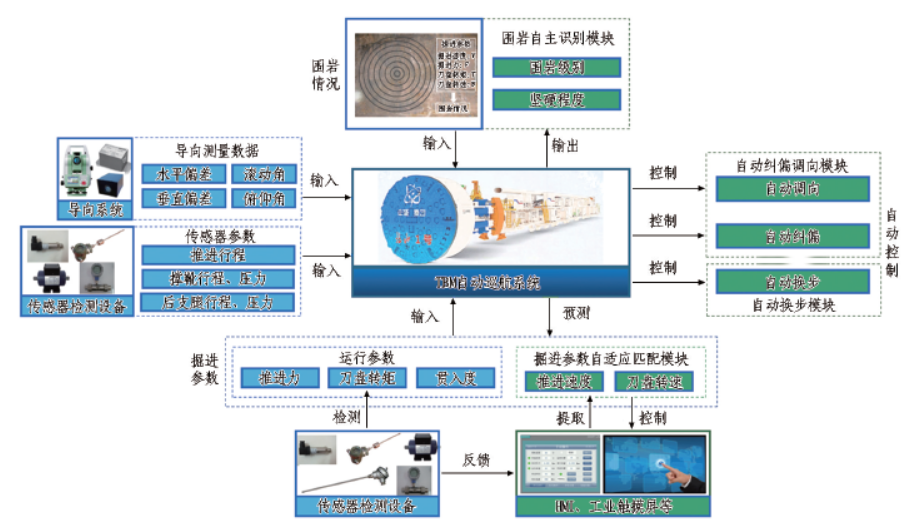
图1 TBM 自动巡航系统架构
1. 2 系统功能模块
为实现TBM 无人驾驶掘进,将TBM 自动巡航系统划分为一键启动模块、围岩自主识别模块、掘进参数自适应匹配模块、自动纠偏调向模块、自动换步模块5个功能模块,包括一键启动功能、围岩预测功能、泵站自启功能、设备自启功能、掘进参数自适应调节功能、纠偏调向功能和自动换步功能7 个功能。TBM 自动巡航系统功能如图2 所示。
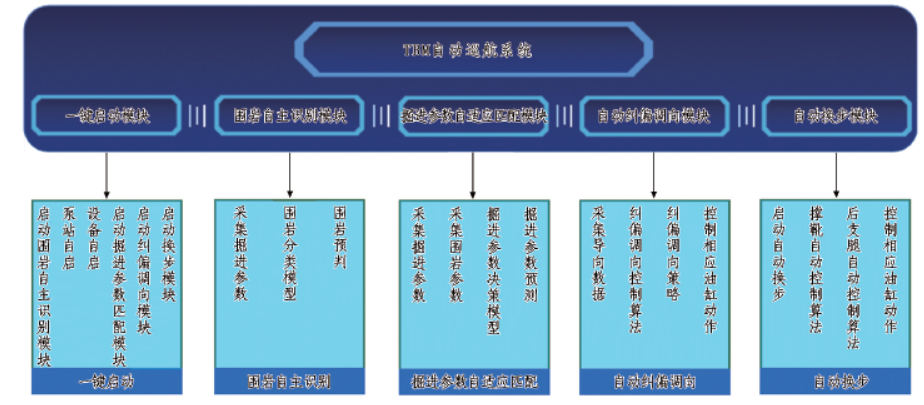
图2 TBM 自动巡航系统功能
1. 3 系统设计
一套完整的TBM 自动巡航掘进控制系统,通过集成以下核心功能模块的协同工作来实现自动化掘进:具备“一键启动”功能的人机交互接口;基于实时数据的围岩状态识别与掘进参数预测模块;以设计轴线为目标的自动纠偏调向与轨迹规划模块;以及可主动识别并执行换步的自动控制模块。基于上述设计,系统能够依次完成从启动、围岩识别、参数匹配、自动纠偏调向到自动换步的全自动化过程。TBM 自动巡航系统的整体控制流程如图3 所示。
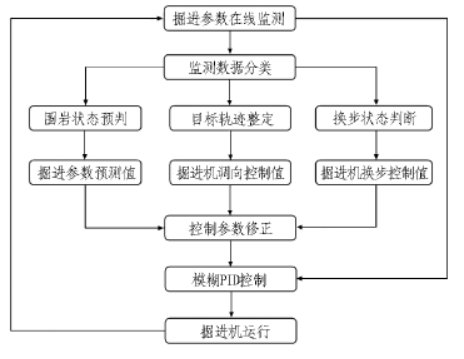
图3 TBM 自动巡航控制流程
2 TBM 自动巡航系统关键技术
为实现对自动巡航技术体系的系统阐述,本节将围绕其核心功能模块展开研究。通过依次剖析一键启动、围岩识别、参数匹配、纠偏调向与自动换步等模块所涉及的算法、模型及控制策略,系统揭示从环境感知、智能决策到精准执行的全链路技术原理与实现逻辑。
2. 1 一键启动模块
一键启动模块用于控制TBM 一键启停,简化操作流程,降低人工操控的复杂度,同时支持状态实时监控与故障报警,确保启动过程的安全性。
基于设备状态感知与启动控制技术设计一键启停控制算法,采用分层模块化设计,设置启动前检测、顺序启动、运行监控和故障处理4 个阶段,通过上位机“一键启动”按钮触发,通过“一键停止”按钮随时退出自动巡航模式,平滑切换为手动控制。一键启动TBM后,首先,自动巡航系统开启围岩预测功能,自主识别当前围岩状态,并获取当前掘进参数确认TBM 各设备当前状态,判定是否满足自动巡航运行条件。然后,基于泵站自启功能和设备自启功能控制TBM 泵站与各设备启动,TBM 进入待掘进状态。此时,系统开启掘进参数自适应匹配功能,获取当前最优控制参数控制TBM 运行,TBM 进入掘进状态。在TBM 掘进状态下,控制围岩预测与参数自适应匹配功能全速运转,保证TBM 自动掘进的自适应性与掘进效率,同时,开启自动纠偏调向与自动换步功能,确保掘进过程中TBM 位姿准确、动作流畅,从而提高TBM 自动掘进的控制精度。一键启动模块控制流程如图4 所示。
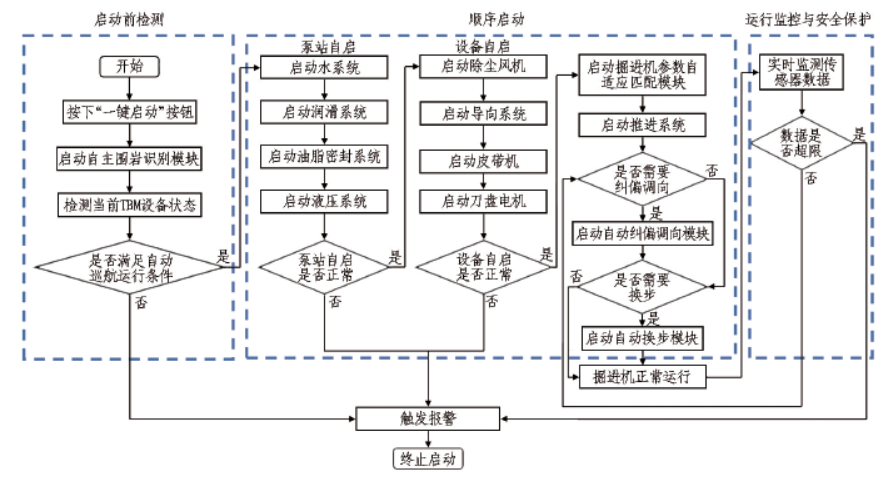
图4 一键启动模块控制流程
2. 2 围岩自主识别模块
围岩自主识别模块基于传感器融合技术,利用机器学习和图像识别,对多源异构传感器数据进行处理、特征提取和融合分析,建立传感器数据与围岩特性之间的映射模型,实现围岩类别的自动识别。
首先,基于LSTM 神经网络分析掘进参数序列建立围岩预测参数模型,模型采用2 层结构,各隐含层单元数为128,输入为传感器实时采集的推进速度、推进力、刀盘转矩、刀盘转速、贯入度5 个维度的归一化序列,输出为5 类围岩等级的预测概率Parg。然后,基于卷积神经网络分析岩渣图像建立围岩预测图像模型,包括卷积层、池化层、全连接层和激活函数等,模型的低隐层是由卷积层和最大池采样层交替组成,高层是全连接层对应传统多层感知器的隐含层和逻辑回归分类器,输出为5 类围岩等级的预测概率Pimg。
由于岩渣图像对应已开挖段,而掘进参数反映的是当前开挖动态,因此参数预测模型和图像预测模型存在时空错位,需要动态校准时间戳。
1)获取岩渣捕获及旋转卸渣延迟时间t1。
式中: θcap 为岩渣从产生位置到最近铲斗前缘的捕获角度; θoff 为岩渣从铲斗捕获位置到卸渣点的旋转角度; n 为刀盘转速。
2)获取皮带机运输延迟时间t2。

式中: lb 为卸渣点到摄像头的皮带长度; vb 为皮带机实测速度。
3)计算总延时td。

4)校准岩渣图像时间戳tr。

式中timg 为摄像头采集到当前岩渣图像的时间。
最后,将围岩图像预测模型输出的围岩等级预测概率Pimg 与参数预测模型输出的围岩等级预测概率Parg 在tr 时刻对齐,并基于置信度动态加权机制对时间校准后的Parg 和Pimg 进行特征融合,得到最终预测围岩等级Pf。

式中: wimg 为图像置信度权重; warg 为参数置信度权重; wimg 和warg 基于Pimg 和Parg 的信息熵动态更新,计算公式如式(6)和式(7)所示。
围岩自主识别功能示意如图5 所示。
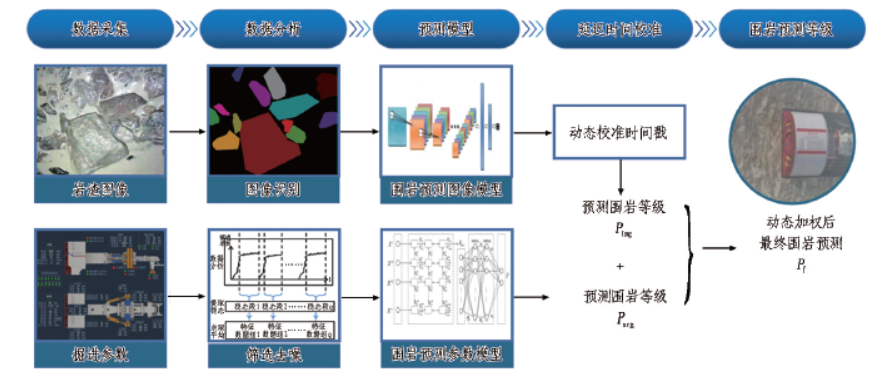
图5 围岩自主识别功能示意图
2. 3 掘进参数自适应匹配模块
掘进参数自适应匹配模块旨在通过优化掘进机控制参数,使其动态适应当前围岩状态,从而减少人工干预,提升施工效率与整体安全性。
掘进参数自适应匹配模块由传感器系统、数据处理与分析单元、决策算法、执行机构、人机交互界面和安全保护机制等组成。其中,传感器系统实时采集包括刀盘转速、推进速度、刀盘转矩、推进力、贯入度等在内的TBM 运行参数。数据处理与分析单元对这些参数以及来自围岩自主识别模块的围岩状态参数进行筛选降噪处理。决策算法作为本模块的“大脑”,是一个融合海量历史数据与专家经验的深度学习模型,其输入为经归一化处理的多维序列,核心包括围岩等级、推进速度、推进力、刀盘转速、刀盘转矩、贯入度等信息,输出为刀盘转速和推进速度的设定值,从而实现了从围岩识别结果到具体控制指令的转化。执行机构(如刀盘电机、推进油缸等)依据决策算法输出的设定值(即刀盘转速、推进速度)驱动相应部件动作,并将关键运行参数与设定值实时反馈至人机交互界面。安全保护机制持续监测系统状态,对刀盘过载、温度过高等异常情况,能根据预设等级触发报警或停机等保护措施。掘进参数自适应匹配模块架构如图6 所示。
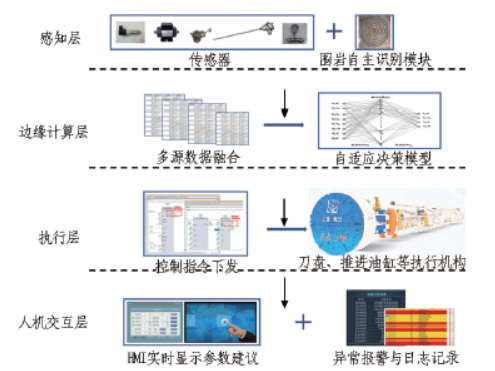
图6 掘进参数自适应匹配模块架构
2. 4 自动纠偏调向模块
自动纠偏调向模块用于实时监测掘进姿态,动态调节推进参数,主动纠偏运行轨迹,确保TBM 按照预定的目标轴线前进,保证隧道施工质量。
自动纠偏调向模块的控制算法包括基于深度学习的纠偏调向参数预测模型、基于最大边刀移动量的纠偏调向姿态模型以及基于最小转弯半径的纠偏轨迹规划模型。TBM 自动纠偏调向过程为: 首先,基于深度学习神经网络建立TBM 纠偏调向参数预测模型,用于获取控制TBM 调向的调向参数预测值;然后,通过分析TBM 调向姿态的动力学模型并结合刀盘的最大边刀移动量,建立TBM 纠偏调向姿态模型,用于对调向参数预测值进行修正;最后,通过基于最小转弯半径的纠偏轨迹规划模型规划TBM 纠偏轨迹,从而得到控制TBM 纠偏调向的最终控制参数,即撑靴油缸动作行程、转矩油缸动作行程和推进油缸推进行程。为确保纠偏调向安全,系统将对轴线偏差和油缸执行状态进行实时监测与动态判断。当监测到因油缸卡滞、泄露或传感器故障引发的行程严重偏离时,系统将自动判定异常并触发报警。TBM 纠偏调向控制模型如图7所示。
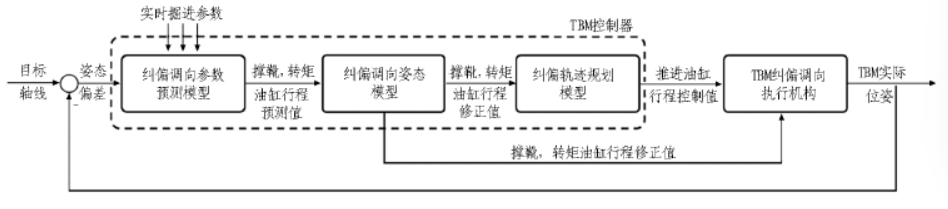
图7 TBM 纠偏调向控制模型
2. 4. 1 基于深度学习的纠偏调向参数预测模型
基于深度迁移学习的纠偏调向参数预测模型如图8 所示。模型由输入层、LSTM 层、全连接层和输出层构成,LSTM 网络深度为3 层,全连接层采用2 层网络,激活函数为Tanh 函数。模型输入为Xt = (Ft 、Vt 、nt 、Tt1、et1、et2、αt 、βt )T,模型输出为Y^ t = (ΔLt 、Δdt )T。其中:F 为推进力; V 为推进速度; n 为刀盘转速; T1 为刀盘转矩; e1 为水平偏差; e2 为竖直偏差; α 为航向角; β为俯仰角; ΔL 为撑靴油缸动作行程; Δd 为转矩油缸动作行程; t = 1,2,3,…,q(q 为特征数据组数量)。Y^t

式中: fG 为通过深度迁移学习后拟合的非线性映射函数; Ds 为从历史隧道数据迁移而来的知识; G 为深度迁移学习神经网络的总权重参数。
2. 4. 2 基于最大边刀移动量的纠偏调向姿态模型
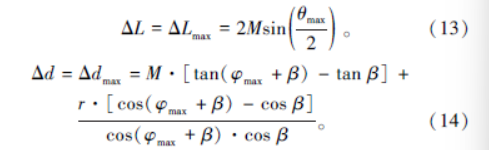
首先,通过分析TBM 调向姿态的动力学模型(见图9)获取TBM 纠偏角度与油缸调节之间的对应关系,得到撑靴油缸动作行程预测值ΔL 与TBM 水平纠偏角θ,以及转矩油缸动作行程预测值Δd 与TBM 竖直纠偏角φ 的关系式为:
式(9)—(10)中: r 为刀盘半径; M 为主梁长度; β 为TBM 当前俯仰角。
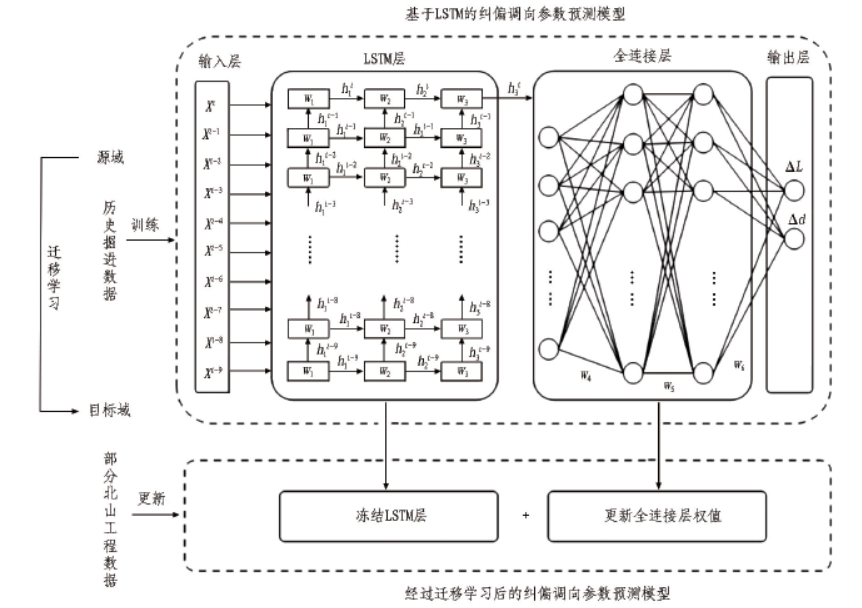
图8 基于深度迁移学习的纠偏调向参数预测模型
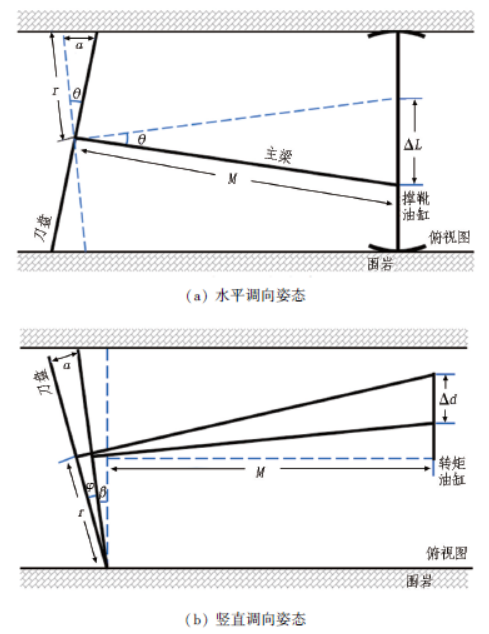
图9 TBM 调向姿态的动力学模型
然后,分析刀盘边刀移动量a 与TBM 水平纠偏角θ 及TBM 竖直纠偏角φ 的几何关系,并基于最大边刀移动量amax 求取最大水平纠偏角θmax 和最大竖直纠偏角φmax 为:
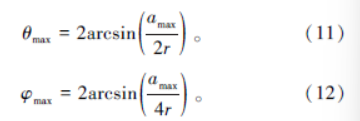
式(11)—(12)中amax 为常数,指单次调向中刀盘边刀允许的最大偏移量,旨在保护关键部件并保证洞壁光滑。
判断θ 和φ 是否超出最大限制角度,若未超限,则无需修正纠偏调向参数预测值;若超限,则修正纠偏调向参数预测值为:
2. 4. 3 基于最小转弯半径的纠偏轨迹规划模型
基于最小转弯半径轨迹规划示意如图10 所示。通过分析图中所示几何关系,获取TBM 水平推进行程X 和竖直推进行程Y 见式(15)—(16)。
式(15)—(16)中R 为TBM 的最小转弯半径,由TBM结构与主机长度决定。
TBM 纠偏轨迹规划推进行程为:

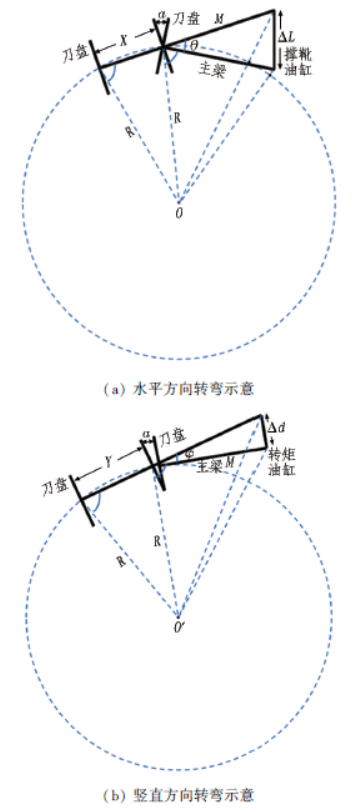
图10 基于最小转弯半径轨迹规划示意图
2. 5 自动换步模块
依据TBM 换步工艺流程,要实现TBM 自动换步,需要解决换步过程中撑靴泄力缩回引起后支腿压力突增导致TBM 姿态变化的问题,以及撑靴撑紧位置可能与钢拱架产生干涉的问题。为此,设计后支腿自动控制策略和撑靴自动控制策略。
基于姿态非线性补偿及闭环控制技术设计后支腿自动控制策略,采取先补偿后动作的调控机制,提前预防因撑靴油缸或后支腿油缸缩回动作引起的TBM 姿态变化。此外,在换步过程中,保持对TBM 姿态的实时监测,并对TBM 姿态微变化进行自适应闭环动态补偿。
基于岩壁实时扫描技术和力-位混合控制技术设计撑靴自动控制策略。首先,通过测距传感器实时岩壁扫描,定位钢拱架位置及偏转角度;然后,基于力-位混合控制技术,控制撑靴伸出阶段优先位置控制,避免踩踏损坏钢拱架。撑靴接触岩壁后平滑切换为力控制,并基于模糊自适应PID 控制撑靴恒压力撑紧。同时,对撑靴压力进行监控和动态微调,确保撑紧力均匀分布,防止盾体扭转。TBM 自动换步控制流程如图11 所示。
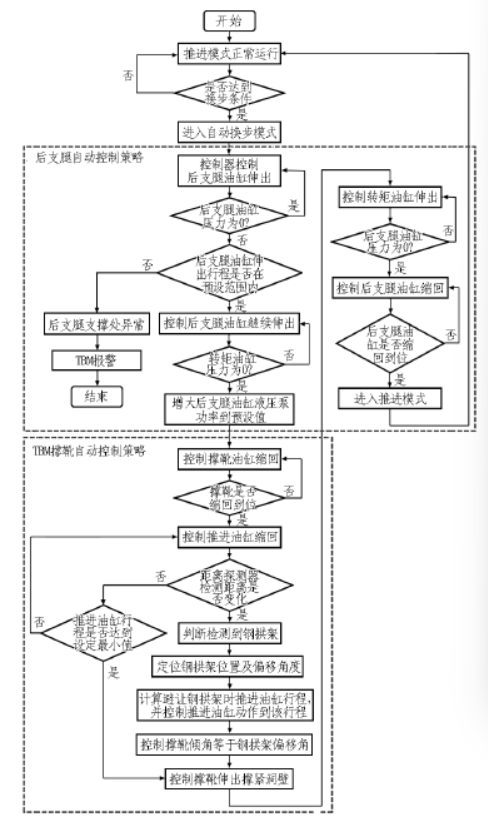
图11 TBM 自动换步控制流程
3 工程应用
3. 1 工程背景介绍
中国高水平放射性废物地质处置地下实验室(简称北山地下实验室)螺旋斜坡道采用敞开式TBM 施工,全长7 113. 8 m,开挖直径为7. 03 m。施工斜坡道最大坡度为-10%,TBM 水平转弯半径为255 m,竖直转弯半径为430 m。岩性以花岗岩、闪长岩为主,单轴饱和抗压强度平均值为170 MPa,最大值为264 MPa。
3. 2 系统界面
TBM 自动巡航系统可与设备现有人机界面集成,运行稳定、简单易用,如图12 所示。该系统采用图形化设计,人机界面友好,能动态展示当前设备运行状态,主要内容为: 1)实时显示掘进机运行参数(刀盘速度、刀盘转矩、推进速度、总推力、推进位移、后配套皮带机速度等)、导向参数(水平偏移量、垂直偏移量、滚动角、俯仰角等); 2) 展示系统当前运行状态(泵启动、设备启动、推进、换步等); 3)展示掘进机与目标轴线的偏移量、趋势图等; 4)实时显示系统预测参数(刀盘速度、推进速度等); 5)实时显示当前围岩情况(围岩等级、坚硬程度等); 6)实时显示泵站状态、系统状态和工作状态等。
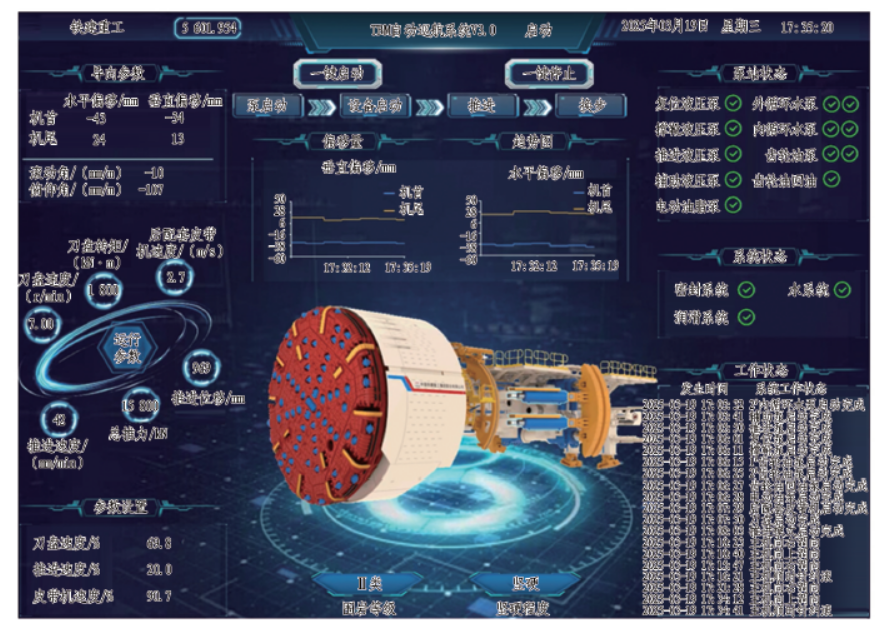
图12 TBM 自动巡航系统
TBM 自动巡航系统集成安装在主控室琴台的上位机上,供TBM 操作者使用。在自动控制模式下,系统自动监测当前运行参数,并根据当前运行参数控制TBM 自动掘进;在手动控制模式下,系统将监测及预测结果显示在人机交互界面上,给司机驾驶提供辅助决策指导。TBM 自动巡航系统现场应用如图13 所示。
3. 3 应用效果
自动巡航系统部署于“北山1 号”TBM,操控TBM在自动巡航系统控制下无人驾驶连续运行60 个掘进循环,读取PLC 上设备运行数据,基于对约6 500 组掘进数据的分析验证,得到TBM 自动巡航系统工地应用效果如下。

图13 TBM 自动巡航系统现场应用
1)围岩自主识别模块程序运行稳定无异常,TBM掘进期间,随机抽取50 组围岩预测结果与实际围岩情况进行比对,预测准确度超过85%,岩类判别准确,可靠性高。围岩级别预测值与实测值对比如图14 所示。
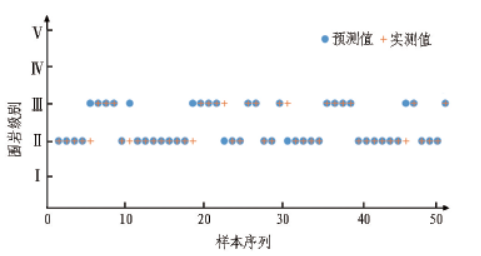
图14 围岩级别预测值与实测值对比
2)刀盘转速、推进速度等掘进控制参数预测值与实测值对比如图15 所示。通过分析可知,掘进参数自适应匹配模块预测值波动较小,预测效果稳定,刀盘转速控制为6~7 r/ min,推进速度为10~25 mm/ min,与以Ⅱ、Ⅲ类围岩为主的硬岩地质情况吻合,参数预测值与实测值偏差比小于5%,满足工程使用要求。
3)TBM 自动纠偏调向控制效果如图16 所示。该隧道螺旋向下且转弯半径很小,在这种工况下TBM 纠偏调向是一个比较大的挑战。分析TBM 自动纠偏调向控制效果可知,水平方向上TBM 水平初始偏差为±50 mm,约在15 个掘进循环后,能将水平偏差纠正到±30 mm,并在之后的掘进循环中,始终保持水平姿态偏差为±30 mm;垂直方向上,控制效果同样良好,TBM 能将垂直姿态偏差约束为±30 mm。由此可见,即使在复杂工况下,TBM 自动纠偏调向模块也能达到精确稳定的控制效果。
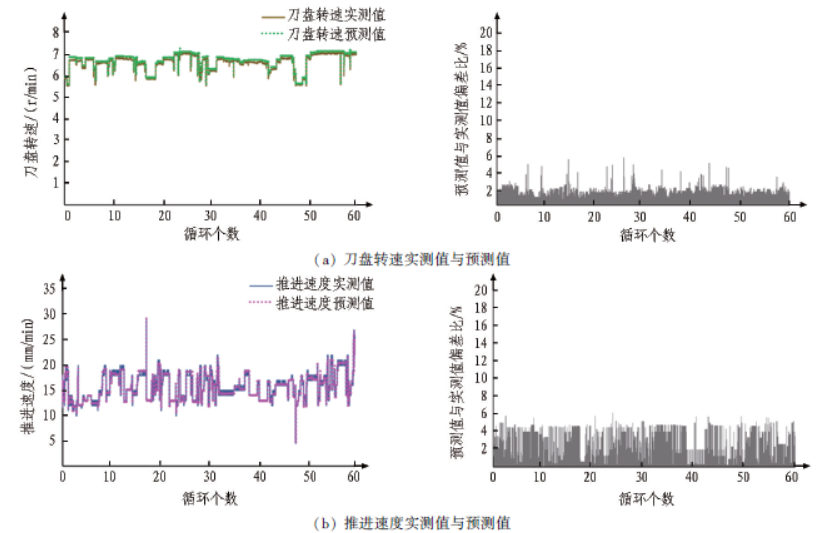
图15 掘进参数预测值与实测值对比
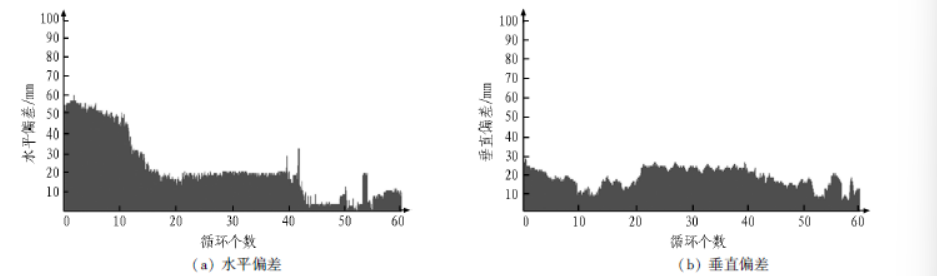
图16 TBM 自动纠偏调向控制效果
4)TBM 自动换步模块能自动控制撑靴与后支腿连续动作,在换步模式下,程序运行正常,能控制TBM流畅地完成自动换步动作,换步时间不大于5 min,且换步前后,通过导向系统测量,姿态基本保持不变。TBM 自动换步前后姿态如图17 所示。
5)TBM 自动巡航系统可通过“一键启动” 按钮一键键入。达到启动条件后,自动巡航系统控制TBM 自动完成刀盘旋转、推进、调向、换步等一系列掘进动作,实现TBM 无人驾驶。系统性能稳定可靠,各项功能均达到设计要求,开挖隧道洞壁光滑,施工质量好。TBM 自动巡航系统隧道施工效果如图18 所示。
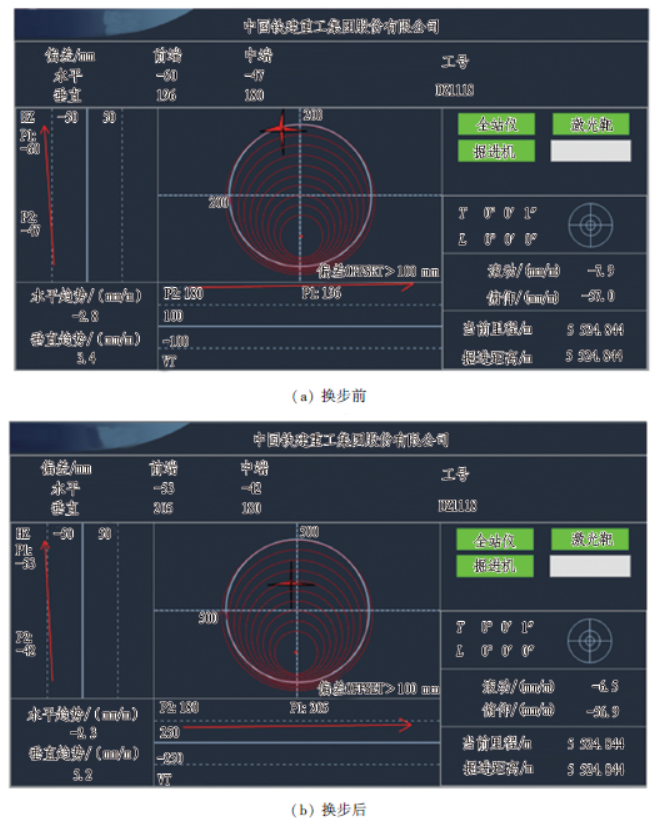
图17 TBM 自动换步前后姿态
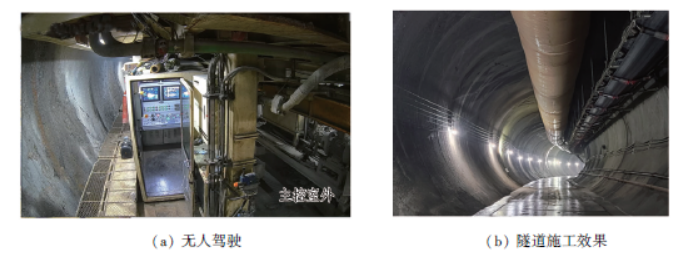
图18 TBM 自动巡航系统隧道施工效果
4 结论与讨论
TBM 自动巡航系统的成功研制与应用,实现了隧道掘进从“人工主控”到“系统智能主导”的范式转变,提高了施工效率与装备自适应能力,确保了掘进轴线精度、隧道成型质量与现场作业安全。
1)系统基于大数据分析、多模态信息融合、多模块协同运行及闭环安全策略等关键技术,实现了从一键启动、自主围岩识别、参数自适应调节、自动纠偏调向到自动换步的全流程自动化作业闭环。
2)TBM 自动巡航系统运行稳定,围岩识别准确可靠,岩类预测准确度超过85%,刀盘转速、推进速度等关键参数预测值与实测值一致性好,且与围岩状态匹配合理,提升了掘进过程的可控性与施工质量。
3)在高难度的-10%下坡、255 m 水平转弯螺旋斜坡道掘进中,系统实现了TBM 姿态的自动精准调节,轴线偏差稳定控制在±30 mm,自动换步后姿态无扰动,换步动作流畅,单循环换步时间不超过5 min,体现了优良的动态控制精度与工序衔接能力。
4)该系统在多源信息融合、基于深度迁移学习的纠偏调向控制以及全流程协同等方面取得显著进展,尤其是在高精度掘进与无人化作业方面,实现了从单机自动化向系统级智能决策的跨越。在理论上,构建了数据与算法驱动的TBM 智能驾驶闭环控制框架;在实践上,提供了覆盖掘进全流程的无人化系统解决方案,对提升隧道工程的质量、效率与安全性具有重要应用价值。
未来研究可进一步聚焦复杂地质条件下的自适应掘进与灾害智能预警,推动掘进-支护全工序智能化协同技术发展,并研发适应极端工况的高可靠性传感与控制系统,以促进该技术在不同地质与施工场景中的广泛应用与持续演进。