0 引言
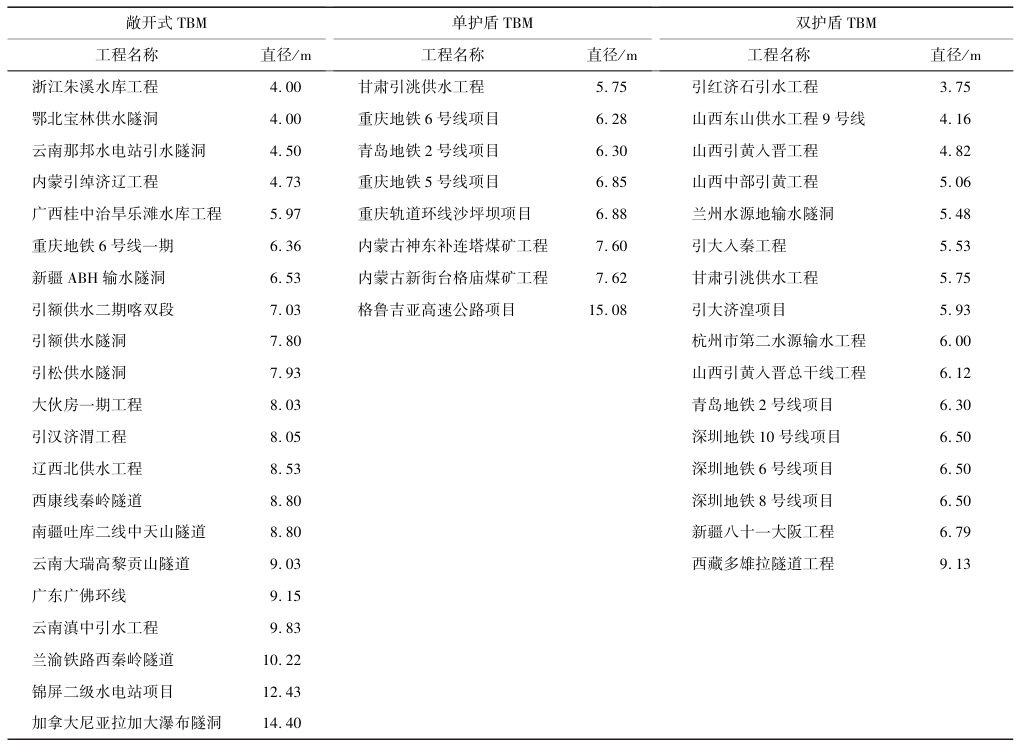
随着机械化施工设备、技术的不断发展,以及人工成本的提高和对安全的愈发重视,全断面隧道掘进机(tunnel boring machine,TBM)在地下工程建设,尤其在超长隧道(洞)施工中得到了愈发广泛的应用。TBM施工具有安全、高效、成洞质量高和对环境扰动小等优点,根据以往工程经验,TBM的施工速度一般为钻爆法的3~10倍。且当隧道(洞)长度大于6km或长径比大于600时,TBM法相较钻爆法表现出 更优的经济性。表1示出中国部分隧道(洞)工程中TBM的应用情况。
表1 中国部分隧道(洞)工程中TBM的应用情况
国外TBM施工技术起步较早。1953年,美国人罗宾斯研制出一台直径为7.85 m的TBM,利用回转刀盘开挖(即同时破碎岩体及掘进)隧洞整个断面,得到成功应用,被认为是第1台现代意义上的TBM。国外发达国家在TBM施工方面积累了较为 丰富的经验,典型的TBM施工隧道(洞)工程包括英吉利海峡隧道、南非莱索托水利输水隧洞、瑞士圣格 达基线隧道、日本东京湾渡海公路隧道、西班牙 Guadiaro隧洞、美国纽约Queens输水隧洞等。我国TBM施工技术发展起源于20世纪50年代,先 后经历了探索、引进、联合制造和自主研发4个阶段,涌现出中铁工程装备集团有限公司(简称中 铁装备)、中国铁建重工集团股份有限公司、上海隧 道工程股份有限公司、中交天和机械设备制造有限 公司、北方重工集团有限公司等TBM制造企业,生产的TBM产品性能已达到国际领先水平。随着 TBM机械设备的不断发展、自动化和智能化技术的不断集成,采用TBM施工逐渐成为未来长隧道(洞)建设的优先选择和发展趋势。TBM机械系统通常配备了上百个传感器监测设备的运行状况,可实时记录大量的运行参数,并在不断发展,例如中铁装备2015年生产的TBM(用于引松工程)每秒可采集199个参数,而2020年生产的 TBM(用于引绰济辽工程)每秒已可采集达401个参数。TBM可以看作大型岩石试验机,其掘进破岩过程 通常可近似看作对岩石进行扭、推的组合作用。众多室内试验、数值仿真和现场测试等研究表明,TBM的运行参数可反映围岩与TBM之间的岩-机相互作用。近几年来,TBM运行数据开始得到针对性的收集和分析利用,推动了TBM智能施工的发展。在传统 施工经验的基础上,进一步研究数据驱动方法以指导工程建设已经成为当前的发展热点。TBM 的操控目标是实现安全高效破岩施工。然而,TBM 对不良地质较为敏感,受限于围岩和地质条件的复杂性和不确定性、施工过程的变异性及掘进控 制的经验依赖性,施工中常面临各种地质灾害、掘进效 率低等问题。因此,在TBM施工过程中,围岩条件的实时感知、施工地质灾害的快速预测预警、掘进控制参数的优化决策是具有重大意义的研究课题。
1)围岩条件的实时感知方面。TBM对于地质条件变化的适应性较差,在掘进过程中需要根据围岩条 件和工程经验进行掘进参数的调控,掘进性能受不良地质条件的约束较为严重。同时,围岩条件也是隧 道(洞)支护结构设计、施工方式选择和施工安全性评价的主要依据。然而,长隧道(洞)往往穿越多个具有复杂地质条件的地层,施工前的地勘钻孔无法 覆盖整个洞线,且刀盘和掌子面间的空间较为狭窄, 通过传统勘探和现场测试方法获取围岩参数具有较大的挑战性,在某些复杂地质条件下无法有效获取准确的围岩分类来指导TBM施工。因此,研究 TBM 掘进过程掌子面近前方围岩条件的实时感知和 预测方法至关重要。
2)施工地质灾害的快速预测预警方面。隧道(洞)作为长距离的隐蔽工程,常常面临复杂且多变的地质条件,故TBM施工中可能遭遇各种施工地质灾害,例如软岩大变形(TBM卡机)、突涌水、岩爆、塌方 和不良气体泄露等,若未得到及时的预测和防控,可能 引发重大的安全风险。TBM 施工中常见地质灾害及占比如图1所示。地质灾害往往具有突发性,及时且准确地预测不同地质灾害风险是指导有效防控和保证施工安全的关键环节。因此,研究针对不同地质 灾害的快速或动态预测预警方法是目前隧道(洞)施工领域的一个难点问题。
3)掘进控制参数辅助决策方面。TBM在不同地 质条件下的适应性掘进是当前掘进控制的研究重点。目前TBM掘进控制主要依赖于TBM驾驶员的施工经验,但由于地质的不确定性、相关破岩理论的模 糊性及经验的差异性,常面临掘进效率低、刀具磨损大,甚至出现各种地质灾害等问题因此,基于TBM 运行参数和围岩条件来寻找最优控制参数值,从而实现提高TBM掘进效率、降低刀盘滚刀磨损(即降 低换刀频率)和减小TBM掘进破岩能耗等优化目标是目前的研究热点。
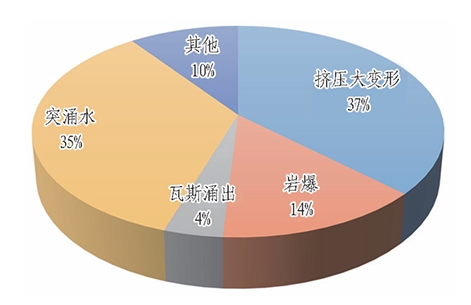
图1 TBM施工中常见地质灾害及占比
近年来,众多研究人员针对前述研究课题开展了大量的探索性研究,提出了多种有借鉴价值的思路和方法,并在已有历史数据集上取得了较好的结果,但对其系统性的综述还相对缺乏。本文对相关 研究成果进行归纳总结,首先以引松工程3标段为例,介绍TBM运行参数及运行数据的基本情况,分析TBM 控制参数及掘进循环各工作阶段划分;然后,通过文献调研近年来TBM智能施工相关的研究进展, 对TBM掘进过程隧道(洞)围岩智能感知、地质灾害预测预警以及TBM掘进控制参数辅助决策3个方面 的研究进展进行综述;最后,探讨目前研究中存在的 瓶颈及后续研究展望,以期为TBM智能施工的相关研究提供借鉴参考。
1 TBM运行参数及运行数据
目前,TBM 设备已可采集上百个运行参数,详细记录设备工作状况。近年来,TBM历史运行数据已被国内外的设备厂商及研究人员重视起来,成为开展TBM智能施工相关研究的基础。有效破岩阶段的关 键运行参数或构造的综合特征指标可用于训练机器学习模型。在围岩条件感知、灾害风险预测预警、掘进控 制参数优化决策等方面取得了初具规模的探索性研究成果。为了更好地开展TBM智能施工相关研究,需对TBM运行控制参数、关键性能参数,以及运行数据规律、有效破岩数据等进行分析研究。本节以引松工程3标段为例,介绍TBM运行参数及运行数据的基本情况和规律。
1.1 TBM运行参数
1.1.1 工程概况
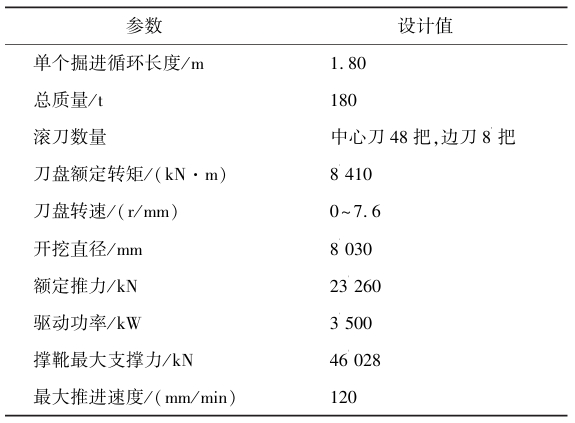
引松工程3标段引水隧洞采用中铁装备2015年生产的“永吉号”敞开式TBM施工,施工长度达20198 m,开挖洞径为8.03 m。“永吉号”敞开式TBM的主要技术参数如表2所示。
表2 “永吉号”敞开式TBM的主要技术参数
在TBM整个掘进施工过程中,以1 Hz的频率采集TBM运行数据,并以d为存储单位。2015年7月至2018年2月,共记录802d,每天收集约86400条TBM运行数据,最终获得40.8亿条数据形成数据库,完整地记录了TBM设备在不同地层和运行条件下的实际工作性能。在数据库中,每条数据包含191个TBM机器参数(如推进速度、刀盘转速、刀盘转矩、总推进力等)、时间戳信息和相应的桩号信息。
1.1.2 TBM运行参数分析
TBM施工以掘进循环为工作单位,即TBM从启动到关闭并完成1次推进的过程。在1个完整的TBM掘进循环中,TBM各运行参数先从0增加到稳定值,然后再下降到0; 受限于推进油缸的最大行程,正常情况下每个掘进循环的进尺约为1.80 m。图2示出某一天中4个关键运行参数的变化情况,共计包含26个掘进循环的数据。直接控制参数为刀盘转速(n)和推 进速度(v),是TBM驾驶员在掘进施工过程中的主要调控参数,属于主动参数。设备的基本性能参数为总推进力(F)和刀盘转矩(T),属于被动参数。在掘进过程中,TBM驾驶员通常根据F和T的实时监测值调 整主动参数,改善TBM的掘进状态,使其与围岩条件相适应。

图2 某一天中4个关键TBM运行参数的变化情况
表3示出TBM掘进破岩过程中的4个基本参数。TBM掘进控制参数设置值与实测值对比示例如图3所示。在大部分掘进循环中,控制参数的设置值与实测值均有较好的一致性。其中,n的设置值与传感器实测值几乎重合,数据波动非常小; v的传感器实测值也基本分布在设置值附近,具有较好的重合性,但相对于n可明显看出v的波动性较大,其实测值在设置值的一定范围内上下波动。这是由于实测值相对设置值会有一定的滞后性,且在参数上升段,控制参数n达到相对稳定值(调整相对较小),而v仍在不断调整的阶段。故在参数上升阶段v的百分误差(δ)较大,这是导致推进速度v中较大δ值相对较多的一个原因。此外,推进速度v实测数据中存在的一些异常值是导致较大δ值的另一个原因。
表3 TBM掘进破岩过程中的4个基本参数
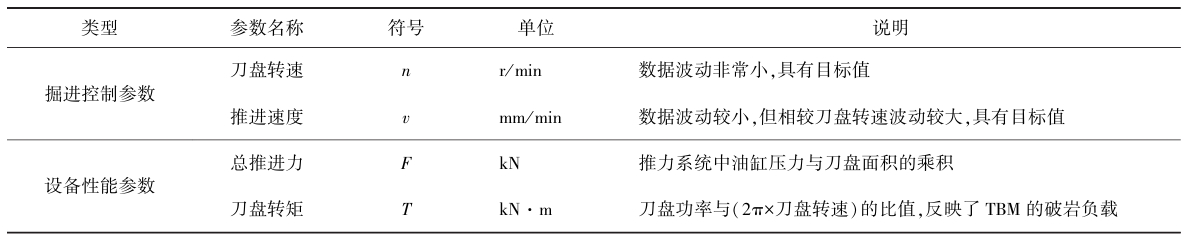
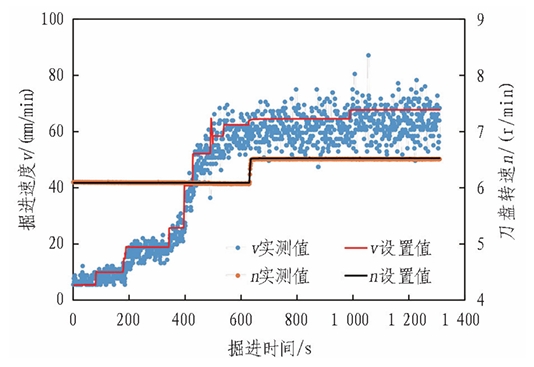
图3 TBM掘进控制参数设置值与实测值对比示例
综上所述,在TBM掘进过程中,控制参数的实测值均能较好趋近其设置目标值,这从一定程度上说明掘进控制的有效性,通过调控v和n来优化TBM工作性能是可行的。目前,大部分TBM设备制造商均采用n和v作为TBM直接控制参数。
1. 2 TBM运行数据
1. 2. 1 TBM 掘进循环划分
根据TBM掘进施工中运行参数的变化规律,可将一个完整掘进循环划分为5个工作阶段,包括启动段 (P1)、空推段(P2)、参数上升段(P3)、稳定段(P4)和 停机段(P5)。其中,P3和P4 为TBM有效破岩阶段。典型TBM掘进循环划分示意如图4所示。
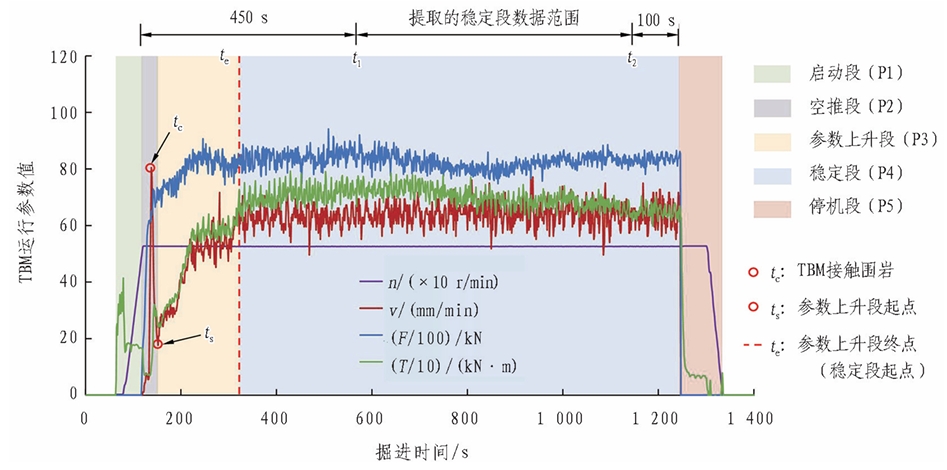
图4 典型TBM掘进循环划分示意图
1)启动段(P1):TBM启动,TBM驾驶员设置n的目标值,n从0逐渐增加至设定值。 在后续其他工作阶段对n不调整或仅进行微调。
2)空推段(P2):TBM刚启动时,刀盘还未接触掌子面(即刀盘与掌子面间存在较小的间隙,这是为避免换步和下一循环启动时刀具冲击岩体损坏而将刀盘后退一小段距离所致)。在空推段,TBM驾驶员设置v的目标值,v从0开始迅速增加。当刀盘前进至接触围岩时会产生振动响应,TBM驾驶员则会通过调控将v迅速降低至一个较低值,从而导致出现“下降沿”,下降沿的终点即为P3阶段的起点。该阶段刀盘并未产生破岩作用,可视为无效数据。
3)参数上升段(P3):刀盘开始切削岩体并进行破岩,各运行参数(除n)值均快速波动上升。参数上升段可视为“试验段”,TBM驾驶员通常基于该工作阶段的设备响应调整稳定段的掘进控制参数值。
4)稳定段(P4):各运行参数达到相对稳定的值, TBM将保持相对稳定的状态不断向前掘进。
5)停机段(P5):推进油缸达到最大行程,各运行参数值逐渐减小至0,表明当前掘进循环结束。该过程中,TBM未进行破岩,所记录的数据也为无效破岩数据。
1.2.2 TBM 运行数据预处理方法
在掘进破岩过程中,各运行参数数据的变化是TBM机械系统与围岩之间的岩-机相互作用的一种反映。根据1.2.1节可知,TBM 掘进破岩的有效数据为参数上升段和稳定段。其中,参数上升段各运行参数数据由较小值波动增加至较大的稳定值,相较于稳定段包含更大的取值范围,蕴含更丰富的岩-机相互作用信息。因此,参数上升段通常是观察掘进状态和掘进控制参数自适应调整的重要阶段。众多研究人员提出了不同的TBM运行数据预处理方法来获取有效破岩数据,从而为开展数据驱动研究提供数据基础。一个典型的TBM运行数据标准化预处理方法可参考文献,包括以下5个步骤。1)无效破岩数据剔除。通过构造状态判别函数 来剔除非掘进零值数据、空推段及停机段的无效破岩数据。构造的状态判别函数(SDF)见式(1):
SDF = f(v)·f(n)·f(F)·f(T)。 (1)
2)掘进循环各工作阶段划分。通过识别“下降沿”获取参数上升段起点,采用累积和法识别稳定段起点等,实现各工作阶段划分。
3)稳定段数据的异常值剔除。主要采用基于四分位点的箱线图法剔除稳定段数据的异常值。需要说明的是,有些学者认为部分“异常值”为反映TBM工作状态的数据,不应剔除。
4)有效运行数据提取。提取参数上升段前30s数据和稳定段(去掉开始和结束的部分数据)一定范围的数据作为有效运行数据。
5)地质条件信息匹配与编码处理。采用独热编 码(One-Hot)方法对工程现场的地质条件标签数据进行编码处理,将地质条件数据的每个类别表示为一个向量。目前,研究人员在TBM 运行数据的工作阶段划分、有效破岩数据提取、基本性能参数分析等方面开展了相应的探索研究。然而,TBM运行数据的变化情况受到驾驶员操作经验和习惯的影响,因此,所提出的标准化TBM运行数据预处理方法应建立在配套的TBM 施工规范化操作流程基础上。此外,TBM可采集的运行参数越来越多,对各参数间的相关性及其与地质条件之间的关联性应进行更深入的分析研究。
2 TBM掘进过程隧道围岩智能感知
2. 1 隧道围岩分类及预测发展现状
围岩条件通常可采用围岩分类(或围岩分级)来表示。其中,在水工隧洞中采用围岩分类的表述,而在铁路和公路隧道中采用围岩分级的表述。本文统一采 用围岩分类来进行描述。围岩分类的概念最早由霍夫曼于1774年在对石灰岩进行系统分类时提出;后经不断研究,围岩分类从单一指标向多指标发展,并从定性描述向定量分析发展。目前,不同学者和行业标准中已经提出了多种工程岩体分类方法。 Bieniawski在调查300多条隧道(洞)工程后,于1973 年提出岩体质量分类(RMR)系统。RMR系统主要考虑岩体的单轴抗压强度、岩石质量指标值、节理间距、节理条件、地下水条件5个参数和相应的修正系数对岩体的质量进行评分,并将岩体 质量分为Ⅰ—Ⅴ5个等级。Barton 等提出的岩体质量分类Q系统也是一种经典的岩体分类方法,该系统考虑了岩体的完整性、地下水条件、地应力和节理特征,并使用6个参数确定反映围岩稳定性的岩体质量指数。根据Hoek-Brown准则,通过考虑结构和不连续面条件对岩体力学性质的影响,Hoek提出了地质强度指数,以实现对工程岩体质量的分类。2002年, Barton修订了Q系统方法,并说明了改进Q系统与 RMR系统之间的对应关系。我国主要使用的围岩分 类方法还包括岩体基本质量指标法(BQ法)和水利水 电围岩工程地质分类法(HC法)。不同的岩体分类方法已广泛应用于隧道、采矿和其他地下工程。然而,基于围岩分类指标的传统分类方法通常用于施工前的地质勘探阶段,各分类方法的指标参数较难在施工过程中快速获取。
此外,对于大多数分类方法,各指标与岩体分类间的映射关系不明确,且几乎没有考虑各 指标分布的随机性。钻探是目前工程中最常用的地勘手段,也是地质 工程师评价地质条件及设计人员开展设计工作的最主要依据。然而,由于隧道(洞)一般较长,且工程地质 条件复杂多变,通过地质勘察钻孔很难揭示隧道(洞) 施工区域精细的围岩分类分布情况。为解决围岩静态 分类所存在的不足,围岩的动态分类得到了关注和发展。目前,基于不同物探原理的超前地质预报技术已成为围岩动态分类的常用手段,根据方法和原理的 不同可分为:地质调查法、地质雷达法、TSP法、TGP法、弹性波反射法、电磁波反射法等。例如,荣耀等综合TGP 探测、地质雷达探测和掌子面编录法3种超前地质预报技术,由粗到细地实现对隧道围岩分 类的动态预测;孙洋等以椿树垭隧道为实例,结合 TSP、地质雷达和工程地质推断法对隧道围岩条件进行动态分类预测;韩永琦基于TSP 预报数据对铁 路隧道围岩分类进行定量和动态划分;陈水龙研究TSP地震信息与围岩力学参数的响应关系,并基于此构建了围岩动态分类体系。不同的超前地质预报方法均存在一定的局限性,将多种超前地质预报技术相结合和将不同方法的预测结果进行相互印证,可以提高围岩分类预报的准确率。
目前,机器学习等人工智能算法在围岩分类上的 应用成为一个重要的发展方向。 隧道(洞)施工中,常用的围岩分类方法(如BQ法、HC法、RMR法等)均是简单地对围岩条件和地质条件相关指标进行计算和求和,未考虑各指标的影响权重;同时,由于各物探参数数据的解译仍依赖人为的主观判断,故在复杂地质环境下,上述围岩分类理论方法和超前地质预报方法的有效性将会受到限制。此外,由于工程系统的复杂非线性,也在一定程度上限制了传统的统计分析和回归模型在围岩分类上的应用效果。近年来,不同的机器学习算法已经在围岩智能分类上取得了较多的研 究成果。例如:汪学清等将TSP法的地震波信号作为SVM模型的输入,实现对隧道围岩分类的预测; 马世伟等利用KNN分类器构建了岩体结构、赋存环境、地质构造等方面的7个指标参数与岩体分类间的非线性映射关系;甘海龙基于现场实测数据检验了BP神经网络在围岩分类中的可行性;Santos等采用因子分析法对RMR参数进行降维得到3个公共因子,并在此基础上建立了人工神经网络(ANN) 预测岩体分类;Jalalifar 等建立了基于模糊推理系统和多元回归分析的2个模型,以准确预测岩体质量分类,结果表明模糊推理系统模型具有更优的预测精度。将不同机器学习模型引入围岩分类预测研究中,可在一定程度上减小人工判断的主观性,并提高岩体 分类的准确性。
2. 2 TBM掘进过程围岩条件感知方法研究现状
围岩的不确定性和不良地质条件是TBM开挖过 程中的主要风险。随着工程建设规模的不断增大,对在TBM掘进过程中能够实时、快速预测围岩分类提出了迫切的需求。然而,岩体理论分类方法的参数通常是基于现场试验或室内试验测得,故无法在TBM掘进过程中实时获取各指标参数。此外,采用不同超前地质预报技术均需要额外的设备及时间成本;且TBM刀盘与掌子面间距离狭小,特别对于护盾式TBM,围岩始终被护盾和管片遮挡,故提前安装地质预 报设备也具有一定的难度。
2. 2. 1 预测方法及模型
TBM是一个复杂的机械系统,其掘进破岩过程中通过传感器自动采集的上百个运行参数,可反映运行状况信息和岩-机相互作用规律,并可用于预测岩体条件。因此,以TBM关键运行参数(或综合特征指标)作为机器学习模型的输入,实现对隧道掌子面近前方区域围岩分类的快速预测成为近几年的研究热点。采用的机器学习算法主要分为监督学习和无监督学习2类。在无监督学习中,所采用的算法主要为聚类分析算法,例如:Zhang 等采用 K-means++聚类 算法,基于刀盘推力、刀盘转矩和日掘进速度3个参数 将围岩分为5类;苏国韶等采用谱聚类算法,基于总推进力、刀盘转矩和贯入度3个参数将围岩分为4 类。基于K-means++聚类和谱聚类的围岩分类示例如图5所示。
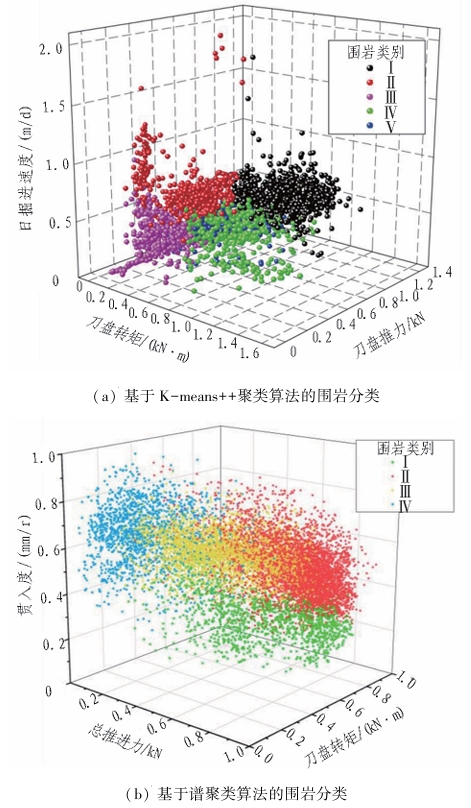
图5 基于K-means++聚类和谱聚类的围岩分类示例
在监督学习中,主要采用神经网络、支持向量机和决策树等分类算法,例如:Salimi 等利用回归树模型建立推力贯入指标(IFP)与岩体质量参数(单轴抗压 强度、岩石质量指标和岩体节理系数)间的相关性;朱梦琦等利用Gini不纯度指标筛选6个TBM运行参数,将其作为AdaCost分类器的输入实现对围岩分类的预测;Liu等基于8个TBM运行参数、IFP和转矩贯入指标(ITP )作为模型输入,构建 AdaBoost-CART 模型,实现对围岩分类的预测;Wu等首先通过岩体可掘性指标和聚类算法将隧道工程现场围岩划分为4种类别,然后基于深度神经网络(deep neural network,DNN)构建了10个TBM关键运行参数与围岩条件之间的映射关系;Hou等通过构建两级学习的Stacking集成学习分类器实现了对围岩分类的预测。表4示出了基于TBM运行数据的围岩分类预测部分成果。
表4 基于TBM运行数据的围岩分类预测部分成果
2.2.2 输入特征选择
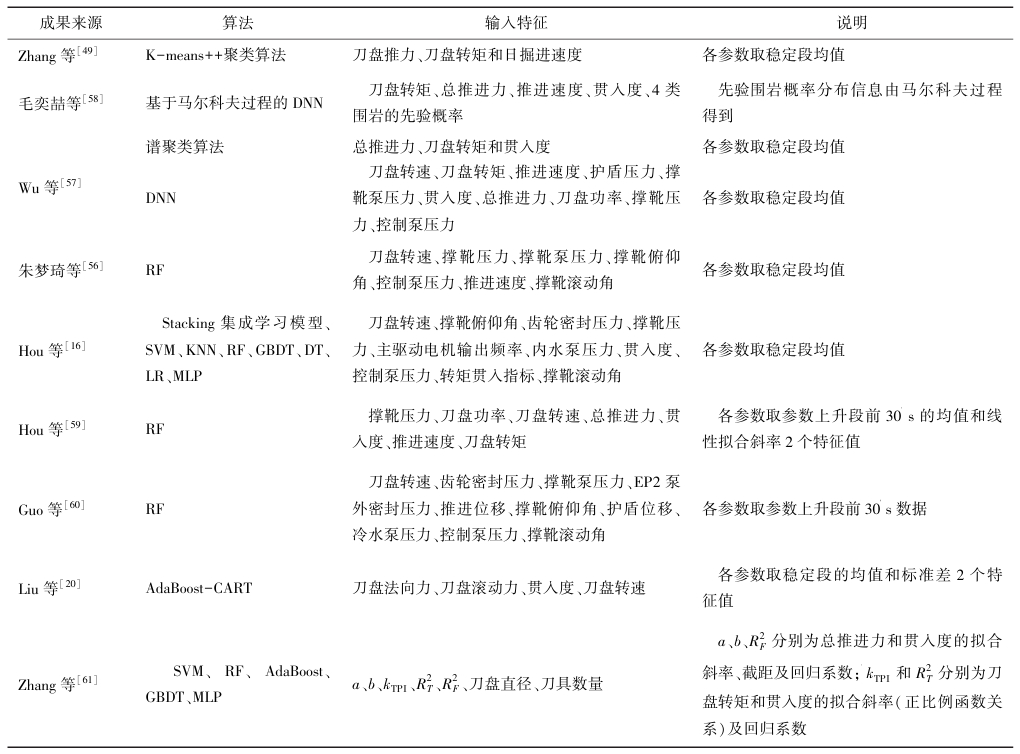
目前基于TBM运行数据的围岩分类预测研究中,多采用TBM设备传感器采集的实时运行参数或综合特征指标(如ITP和IFP 等),部分研究中分类器采用的输入特征如表4所示。特征选取方式主要分为3类:
1)根据工程经验或参考他人研究成果进行选择,多采用刀盘转矩(刀盘滚动力)、总推进力(刀 盘法向力)、推进速度、贯入度、刀盘转速等反映TBM开挖负荷或效率的基础参数。
2)目前大多数研究人员采用特征重要性分析方法,即通过基于决策树(或随机森林)算法的特征变量重要性计算方法(利用Gini指标或信息熵指标)等对TBM运行参数(剔除冗余特征及常值/零值特征后)进行特征重要性排序,直接筛选或通过基于包裹式特征选择方法筛选围岩分类预测最重要或 贡献最大的若干特征参数。具体而言,包裹式特征选择方法即从特征集合中依次选择1~N(N为特征总个数)作为特征子集训练预测模型,并根据模型性能进行评价,选择最优的特征子集。例如: Hou等首先通过方差滤波剔除方差为0的特征,其次采用高相关滤波剔除高相关冗余特征,最后基于随机森林的Gini指数对特征重要性进行排序,最终得到10个关键运行参数作为围岩分类预测模型的输入特征;何伟依托新疆YE工程,依次采用方差滤波、高相关滤波、随机森林特征重要性排序和包裹式特征选择方法,从228个特征中得到了14个围岩分类模型的关键输入特征。
3)采用知识驱动方法进行特征筛选。以中国水利水电科学研究院陈祖煜院士团队为代表的多个研究团队均发现,对于一个正常掘进循环(可认 为围岩条件不变)中的有效破岩数据,总推进力(F)与贯入度(Pr)呈现过原点的线性关系(即正比例关系),而刀盘转矩(T)与贯入度(Pr)呈现有截距的线性关系。TBM掘进循环中F-Pr和T-Pr拟合关系曲线示例如图6所示。因此,Zhang等采用了总推进力和贯入度的拟合斜率a、截距b及回归系数R2 F ,刀盘转矩和贯入度的拟合斜率kTPI 和回归系数R2T ,以及刀盘直径、刀具数量共计7个特征作为模型输入预测围岩分类。
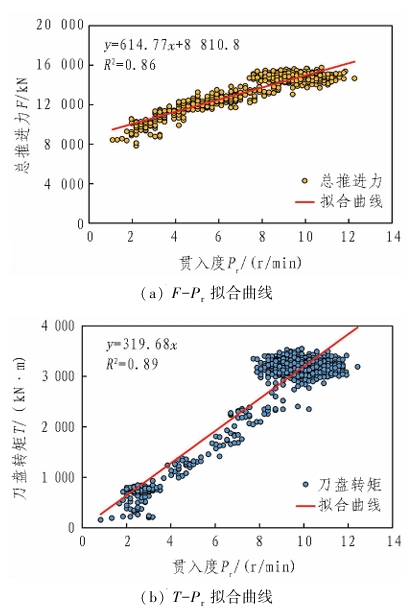
图6 TBM掘进循环中F-Pr 和T-Pr 拟合关系曲线示例
2.2.3 样本不平衡应对策略
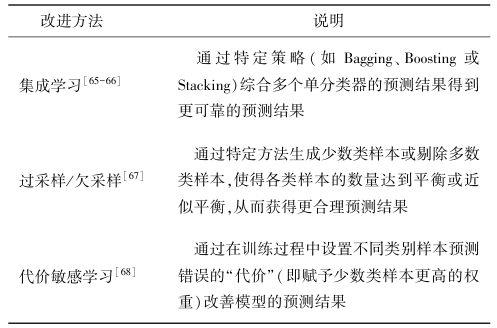
在现有研究中,很多学者使用了不同的单分类器(如SVM、KNN、神经网络和决策树等)预测围岩分类。 然而,在实际隧道(洞)工程中,属于不同围岩分类的样本比例往往相差较大。例如:在引松工程3 标段中,Ⅲ类和Ⅳ类围岩的总占比达到约87%,而Ⅱ类和Ⅴ类围岩的样本相对较少。因此,围岩分类 通常属于样本不平衡情况下的预测问题。对于这类问题,单分类器很容易陷入对多数类样本的过拟合问题中,导致对少数类样本的预测性能较差。集成学习是一种强大的技术,通过特定的方式将多个单分类器集成,形成更强的分类器;常见的集成学习分类器包括:随机森林(RF)、梯度下降树( GBDT)、Stacking集成学习模型等。研究表明,集成学习模型具有很强的泛化能力,在不平衡数据集上往往表现出更好的分类效果。 除了采用集成学习策略外,克服样本不平衡问题的其他方法包括使用过采样技术或欠采样技术改变不同类别的样本数量比例,或采用代价敏感学习提升模型对不平衡样本集中少数类样本的预测精度。表5示出样本不平衡下分类模型预测效果的改进方法,其中过采样/欠采样技术和代价敏感学习在本文中不进行过多介绍。 以上这些方法可以在一定程度上提升模型对少数类样本预测性能,但总体而言,样本数量仍是限制少数类样本预测精度的最主要因素。
表5 样本不平衡下分类器预测效果的改进方法
总体而言,大数据和人工智能技术的发展和成功应用,推动了各专业领域对数据的重视。结合TBM运行数据和机器学习模型为隧道(洞)施工中围岩条件的实时感知和预测提供了一种可行的思路。虽然目前已经构建了不同的预测模型,且表现出了较好的围岩分类效果,但最终实现更好的工程应用仍需着力于从2方面进行改进提高预测性能:1)从模型角度构建更加精确的预测模型;2)从数据角度引入多源数据或更多其他工程数据为模型提供更多的可解释变量或学习信息,并针对样本不平衡数据集的有效应对策略等方面进行深入研究。
3 TBM掘进过程地质灾害预测预警
对隧道施工地质灾害的预测方法进行综述,介绍近年来在TBM施工地质灾害智能预测方面开展的研究及探索工作,包括隧道塌方风险预测和TBM卡机风险预测2个方面。除了塌方和卡机,隧道突涌水和岩爆也是TBM施工中的常见灾害,其中突涌水预测目前多采用层次分析法、模糊数学、可靠度理论、贝叶斯网 络和神经网络等方法构建各致灾因素指标(包括地质构造因素、水文地质条件因素和施工监测因素等)与突涌水风险之间的映射关系;岩爆预测目前多为基于信号拾取算法和人工智能模型对微震监测信号进行识别、分析,从而实现对岩爆的定位及烈度预测。由于利用TBM 运行数据进行岩爆和突涌水预测的研究仍相对较少,本文对这2种地质灾害的预测预警不展开详细介绍。
3. 1 隧道(洞)施工地质灾害预测方法
根据对国内外TBM施工隧道(洞)工程的不完全统计,隧道(洞)TBM施工中典型的施工地质灾害问题包括软岩挤压大变形(易导致TBM卡机)、岩爆、突涌水、瓦斯气体涌出和围岩失稳塌方等。各种施工地 质灾害若未得到有效预测和及时防控处理,将可能给隧道(洞)施工带来重大的安全风险,甚至引发事故,出现人员伤亡。在TBM掘进过程中,对不同施工地质灾害的快速和有效预测,可指导防控措施设置,对保证TBM的施工安全具有重要意义。对于隧道(洞)工程不同施工地质灾害,预测方法可归纳总结为以下5类。
1)经验分析方法。在已建工程积累的施工经验的基础上,利用不同的统计分析手段,构建围岩条件、施工要素和各施工地质灾害之间的经验关系。该方法通常考虑的因素不全面,适用于特定工程,推广应用的效果相对较差,多用于早期的隧道(洞)工程建设中。
2)理论分析方法。 基于岩土体工程领域不同的力学理论对不同地质灾害的产生机制进行理论推导和计算,或对一些灾害的机制试验结果进行分析总结,从而针对不同施工地质灾害提出相应的理论判据等,可实现对不同灾害风险的评价和预测。该方法通常对实 际工程进行了合理的简化和假设,由于不同地质灾害的致灾机制通常非常复杂且涉及因素众多,导致所构建的理论分析模型较难应用于复杂地质条件下实际工程的施工地质灾害预测。
3)数值仿真方法。该方法是模拟隧道(洞)施工过程和分析灾害发生风险的常用手段,随着众多学者的不断研究,目前已经发展出多种数值仿真方法,如有限元法(FEM)、离散元法(DEM)和耦合FEM-DEM法等。数值模型的计算效果比较好,但具有较强的网格依赖性,且需要对数值模型的各部分单元设置合理的本构模型和参数值。此外,建立大型工程的复杂模型是耗时费力的过程,且对于长大隧道(洞)工程,数值方法通常只针对典型和关键段进行施工前的安全评价及分析。因此,数值仿真方法同样较难应用于隧道(洞)TBM 施工过程中的地质灾害实时预测。
4)监控测量方法。采用不同监测设备对各灾害发生前的征兆(关键参量)进行监测,当出现特殊监测信号或关键参量监测值达到某一阈值时,表明有地质灾害发生或存在灾害风险。例如,根据微震监测信号实现对岩爆灾害的预测,根据应力、位移、微震、激光点云、红外等内部力场-外部机器视觉的联合监测信号实现对深部岩体工程强突涌水灾害的实时监测预警。在长大隧道(洞)施工中,采用监控测量方 法会额外增加设备和时间成本,且由于TBM机身振动 和现场施工噪声等干扰,会在一定程度上影响对微震等声波信号的识别。对于护盾式TBM,由于围岩始终 被衬砌管片和护盾遮挡,较难在现场进行传统监测设备的安装和测量工作。
5)机器学习方法。 通过不同机器学习算法构建 直接或间接关键致灾因子与具体施工地质灾害间的映 射关系模型,从而实现对工程地质灾害的有效预测。该方法可以结合前述任意一种方法,通过机器学习强大的非线性映射关系处理能力构建预测模型,从而代替传统的人工分析和判断,提高对不同地质灾害风险的预测准确率。
3.2 隧道(洞)塌方风险预测预警研究现状
塌方是隧道(洞)TBM施工过程中的典型地质灾害,可能导致护盾和刀盘的卡机、机器损坏、工期延长、 成本增加,甚至人员伤亡和其他重大损失。塌方与隧道(洞)围岩的开挖卸荷失稳紧密相关,其影响因素十分复杂,许多学者针对此进行了研究。围岩失稳风 险分析和预测方法可分为4类:1)理论分析方法; 2)监控测量方法;3)数值仿真方法;4)机器学习方法。
3.2.1理论分析方法
采用一定的合理假设将实际问题数学化,并基于力学机制分析隧道(洞)开挖后围岩的稳定性。该方法的理论框架主要包括极限平衡法和极限分析法。许多学者对这2种方法进行了研究和扩展,并基于各种改进的理论分析方法对围岩稳定性和塌方风险分析进行了大量研究工作。例如:黄跃基于块体极限平衡理论分析了新疆某山岭隧道塌方事故的整个过程;Fraldi等参考Hoek-Brown破坏准则,在塑性理论领域中借助变分法推导得出了隧道塌方的精确解;严若明等在Hoek-Brown 破坏准则下,运用极限分析原理分析了浅埋圆形隧道的塌方破坏机制。由于影响隧道(洞)塌方的因素较为复杂,理论分析方法往往在一定程度上简化了实际工程情况,故对于复杂地质条件下的隧道(洞)施工风险分析及预测,该方法仍存在较大的局限性。
3.2.2 监控测量方法
监控测量方法通过监测预警信号或征兆(如隧道拱顶沉降、围岩收敛变形、围岩内部压力和衬砌管片应力)来评估隧道(洞)塌方的风险。其中,相对变形和变形加速度是评价围岩稳定性最常用的指标。此外,一些学者利用微震监测技术,通过分析隧 道围岩失稳前的微震事件的变化特征、数量和微震能量,对隧道塌方风险进行评估。图7示出隧洞爆破施工过程中微震特征参数演化过程。可以看出,随着 逐渐接近塌方发生时刻,出现微震b值逐渐达到最低值、大震级事件逐渐增多、微震事件主频中低频占比逐渐增高等现象,这说明基于微震指标的塌方行性。然而,对于大规模的隧道(洞)工程,布设监测设备的成本通常较高,且微震信号在一定程度上受TBM 机身振动和现场其他施工噪声的干扰,增加了通过微震监测技术识别有效信号的难度。此外,对于使用护盾式TBM和预制管片施工建造的隧道(洞),围岩在TBM掘进过程中始终被护盾和衬砌管片遮挡,安装变形监测设备较为不便。
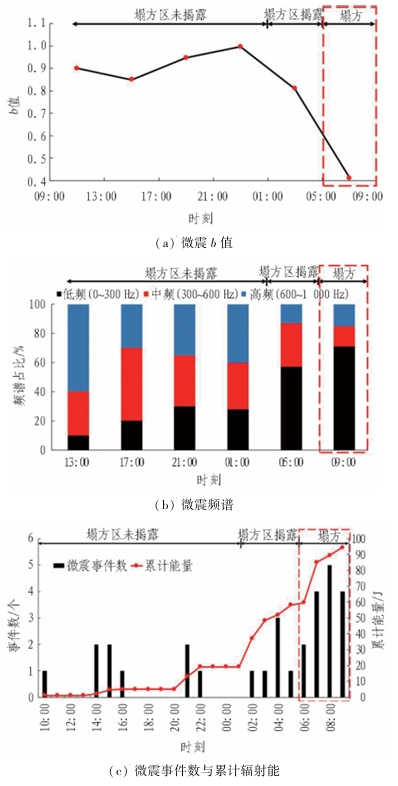
图7 隧洞爆破施工过程中微震特征参数演化过程
3.2.3 数值仿真方法
数值仿真方法是分析解决工程问题的重要技术手段。许多学者采用不同的数值方法研究了岩体开挖卸荷后的稳定性和塌方风险。例如:Fraldi等在研究中对圆形岩石隧道塑性塌方的数值模拟和分析方法进行了比较;刘利生等结合数值模拟和现场监测方法研究了穿越倾斜断层隧道的塌方力学机制;孙萍等采用二维离散元(DEM)对秦岭Ⅲ号隧道塌方过程的3个阶段进行了数值仿真;Li等基于非连续变形分析(DDA)方法对隧道塌方进行了数值模拟,并通过与缩尺物理模型试验的对比验证了数值方法的有效性,隧道塌方过程的DDA模拟结果如图8所示;马正逵采用基于离散元法的3DEC软件建立隧道塌方的数值仿真模型,研究了不同层理角度和岩体完整性下的围岩坍塌破坏机制。采用连续模拟方法(如有限元和有限差分)通常将围岩作为连续体进行处理, 通过屈服区(或塑性区)等间接评价围岩的稳定性,与实际塌方情况存在一定出入。而采用离散元方法可以较好地模拟出塌方的过程和最终塌落体,但由于对运 动、受力、变形等要素都进行了假设,理论严谨性方面存在一些不足,且参数标定和复杂模型的建模较为困难。此外,数值方法多用于灾害的事前或事后分析,无法在隧道(洞)施工过程中实时预测塌方风险。
3.2.4 机器学习方法
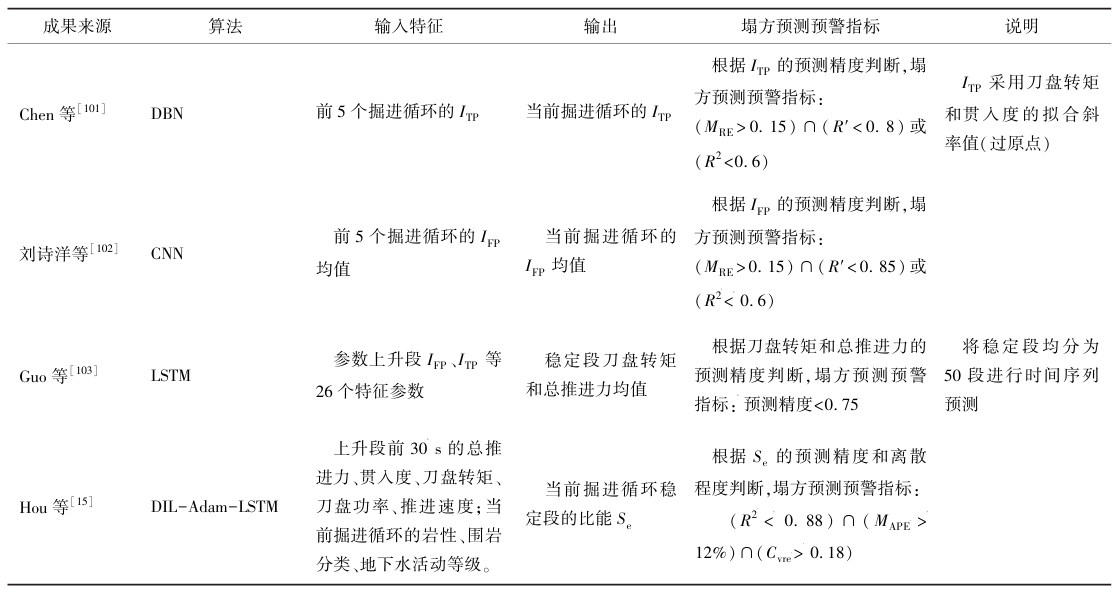
基于机器学习的塌方预测研究中,一方面以现场施工情况和地质条件数据作为模型输入,构建塌方风险分析或预测模型。例如:苏永华等选取影响塌方的若干因素(包括BQ值、跨度、埋深、地下水情况、偏压角情 况和设计施工质量及施工工况),采用粗糙集补齐算法对缺失信息进行修复,并构建了基于广义回归神经网络 的塌方量预测模型;李泽荃等提出基于事故树和贝 叶斯网络的隧道塌方风险概率估计方法。另一方面,近年来已经有一些学者开始针对基于TBM运行参数或综 合特征指标的塌方灾害预测方法进行了研究。基本思 路为利用“正常”掘进段的数据训练机器学习模型,并根 据塌方段附近区域预测精度下降的现象,通过设置阈值 评价塌方风险。Chen等和刘诗洋等分别采用深度置信网络和卷积神经网络以及“五推一”时间序列预 测法,通过预测误差评价指标对ITP或IFP的预测结果进行分析,构建了塌方预测的评价判据;其中ITP预测值可以通过控制参数n和v转换为T预测值,不同TBM 掘进循环段的时间-转矩曲线如图9所示。Guo等通过将上升段TBM运行参数作为LSTM模型输入,预测了稳定掘进段的转矩和推力,并基于此提出3阶段分 析方法实现塌方预测。Hou等建立基于Adam LSTM的比能预测模型,并根据塌方及邻近区域预测结果精度下降和离散程度增大的规律,通过对统计指标的阈值分析构建预警指标体系,并形成TBM掘进过程的塌方预警方法,某一水工隧洞塌方实例的预警结果如图10所示。基于TBM运行数据的隧道(洞)塌方预测预警的相关成果总结如表6所示。
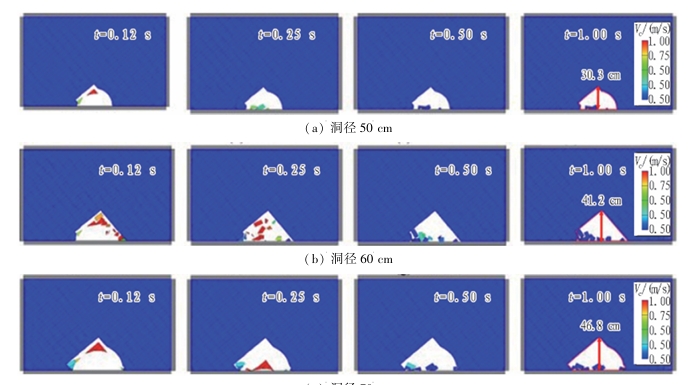
图8 隧洞塌方过程的DDA模拟结果
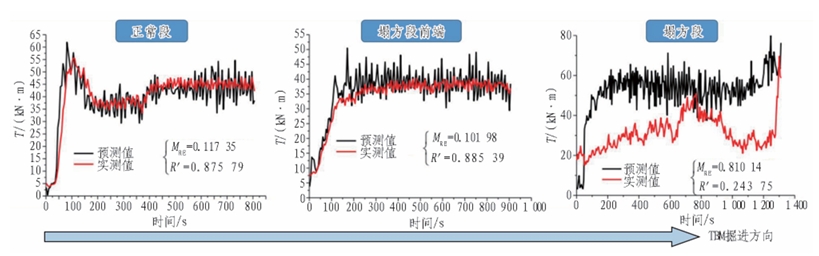
图9 不同TBM掘进循环段的时间-转矩曲线
R2 为拟合优度;MAPE 为平均绝对百分比误差;Cvre 为变异系数的相对误差。
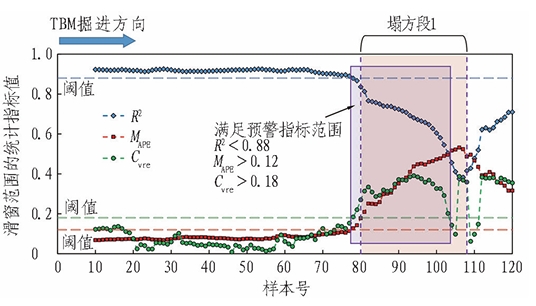
图10 某一水工隧洞塌方实例的预警结果
目前,针对利用TBM运行数据和综合特征指标(如IFP、ITP、Se)来实现塌方预警的研究仍处于探索阶段,且由于工程现场的塌方实例较少,构建的预测模型和预警指标体系的有效性仍需要结合更多工程进行验证和进一步研究。 此外,需要注意的是,表6中的相关研究均是建立在地质条件具有一定的连续变化性的条件下,而对于突发性的塌方并不一定能有效地实现预测预警。在这些方法的基础上,结合超前地质预报等手段的多源数据信息 进行综合判断,有望取得更好的塌方灾害预测预警效果。
3.3 TBM卡机风险预测研究现状
TBM卡机分为刀盘卡机和护盾卡机2种类型。当围岩破碎、自稳能力差时,开挖后围岩易破碎坍塌而导致刀盘被卡,通常可采用增大刀盘转矩、超挖、超前注浆等方式避免或进行脱困处理;而护盾卡机多发生在高地应力和复杂地质条件的施工区域,通常脱 困处理更为困难,既影响施工安全,又增加施工的工期 和成本。因此,对于TBM卡机的评价或预测多聚焦于围岩挤压大变形引起的护盾卡机。
表6 基于TBM运行数据的隧道(洞)塌方预测预警的成果总结
TBM护盾卡机风险评价的前提是准确预测围岩与护盾的挤压作用力,分析围岩对TBM掘进的摩阻力大小,其影响因素可以归纳为3类。1)岩体性质因素: 岩体强度(如单轴抗压强度Rc和抗拉强度σt)、弹性模量(E)、地质强度指数等。2)TBM相关因素: 超挖量(ΔD)、护盾长度(L)、推进速度(v)、最大推力(FI)等。3)其他影响因素: 隧道直径(D)、地应力(σ0)、围岩与护盾间的摩擦因数(μ)、回填距离(l)等。已有的TBM护盾卡机风险分析和预测研究方法 主要包括4类: 1)经验方法; 2)理论分析方法; 3) 数值仿真方法; 4)人工智能方法。
3.3.1 经验方法
在TBM护盾卡机风险预测的早期研究中,主要是根据工程经验建立评价围岩挤压变形程度的指标,并基于此分析TBM的卡机风险。例如: Aydanö等定义了完整岩石的强度与上覆压力的比值,并根据日本 隧道(洞)工程的经验进行总结,认为当比值小于2.0 时会出现挤压条件。1998年,Hoek提出岩体单轴 抗压强度与地应力的比值可作为评估潜在隧道(洞) 挤压风险的指标。Hoek等提出隧道(洞)应变图 可用于评估挤压条件下的TBM卡机问题;隧道应变的经验公式在2000年Terzaghi讲座中被提出。此外,一些研究人员对围岩与TBM之间的相互作用关系 进行了初步的定性分析,并取得了一定的成果。然而,经验方法往往考虑的因素较少,而且由于隧道 (洞)工程面临的施工环境通常较为复杂,导致经验模型对特定的具体工程具有良好的效果,但较难拓展应 用于其他隧道(洞)工程。
3.3.2 理论分析方法
对于TBM护盾卡机问题,理论分析方法主要是基于力学理论分析,得到岩体开挖卸荷后的应力状态,并基于此计算和分析围岩收敛变形发展以及围岩与护盾间的相互作用。例如: Carranza-Torres等提出基于收敛约束法的围岩挤压变形评价方法; 温森等考虑了隧洞掌子面和衬砌支护的影响,使用收敛约束法和风险分析计算了围岩对护盾的压力;Zhang等使用改进的Vlachopoulos-Diederichs方法得到隧道(洞)的纵向变形剖面,并推导出挤压地层中护盾卡机的理论计算模型。但是理论分析往往简化了实际工程,且没有考虑TBM掘进过程的影响。
3.3.3 数值仿真方法
各种数值仿真模型已在TBM护盾卡机分析中得到了广泛应用。即基于一定的假设,依次计算得到围岩与护盾的接触面积、围岩挤压护盾的压力、TBM掘进中需克服的摩擦阻力,进而分析TBM护盾卡机的风险。例如: Hasanpour等提出了在挤压地层和不良地质条件下双护盾TBM施工的数值仿真模型,并基于此分析了TBM掘进过程中的卡机风险;黄兴等提出了卸荷围岩的挤压大变形本构模型,并通过数值 仿真分析了不同刀盘扩挖量下的TBM卡机情况,基于数值仿真的卡机判断示意如图11所示;Sun等提出了一种改进的三维有限差分模型模拟严重节理岩体 中的TBM护盾卡机现象,通过采用合适的本构模型和设置合理的材料参数,所建立的数值模型能够很好地 反映实际TBM护盾卡机的力学机制目前,数值仿真 方法仍是分析TBM护盾卡机问题的主要、有效手段。然而,该方法通常需要针对特定的工程建立具体的数值模型,当工程规模较大且工程地质条件较为复杂时,模型的建立和计算可能需要耗费大量的时间。此外,数值仿真模型通常模拟隧道(洞)工程的具体施工段,而非整个洞线,因此不便于及时分析或快速预测TBM 掘进过程中所有施工段的卡机风险。
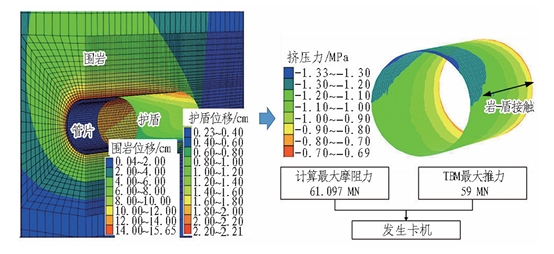
图11 基于数值仿真的TBM护盾卡机判断示意图
3.3.4 人工智能方法
近年来,人工智能技术已成为解决岩土体工程问题的有力工具,并在TBM掘进性能预测、岩体质量预测和围岩响应预测等方面进行了有效应用。BM 护盾卡机风险等级的预测属于分类问题,可以从2方面入手进行研究,即直接预测和间接预测(预测隧道围岩挤压或隧道围岩收敛)。1)直接预测。直接将卡机影响因素作为模型的 输入来预测卡机风险。例如:Lin等构建了贝叶斯网络模型,可通过掌子面前方的地质信息预测TBM卡机的概率;Hasanpour等通过数值仿真构建样本库,并通过贝叶斯网络模型预测卡机概率;颉芳弟等收集了隧洞TBM 施工的地质条件数据,筛选卡机的13个风险因素和7个风险事件,并基于动态贝叶斯网络实现对卡机风险的预测,无证据条件下的TBM卡机贝叶斯网络模型如图12所示。
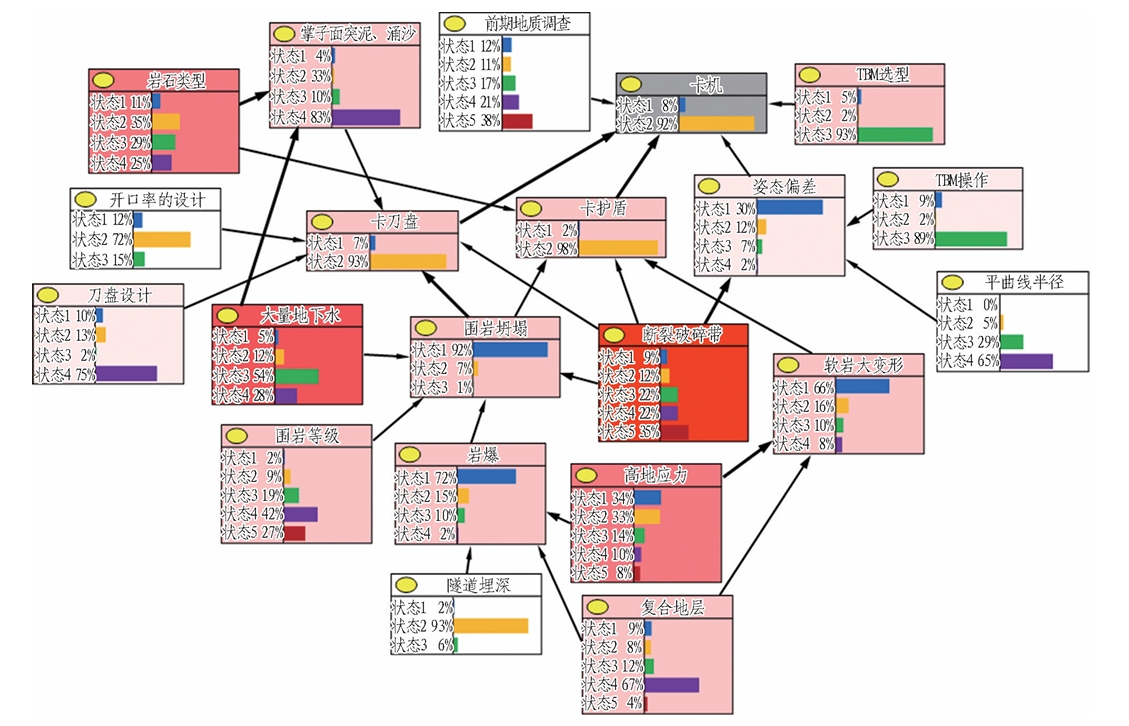
图12 无证据条件下的TBM卡机贝叶斯网络模型
2)间接预测。先通过机器学习模型预测隧道(洞)围岩挤压力或收敛变形,并基于预测结果分析围岩与护盾间挤压力和TBM掘进所受的总摩阻力, 进行卡机风险评价。例如:Feng等构建了贝叶斯网络模型,并利用支护刚度、岩体质量指标Q值、 隧道(洞)埋深、隧道(洞)直径和强度应力比5个参 数,实现了对隧道(洞)围岩挤压风险的预测; Mahdevari等构建人工神经网络(ANN),并基于共计9个地质条件参数和岩体参数作为ANN模型输入,实现了对隧洞围岩收敛变形的预测;同年,Mahdevari 等应用支持向量机(SVM)的回归模型预测了隧洞围岩的收敛变形,与ANN模型相比,SVM模型表现出更好的预测性能。需要注意的是,机器学习模型的训练效果依赖于大量且有效的数据样本,而对于TBM护盾卡机等工程问题,通过现场监测或已有工程获得的数据样本总量相对较少,无法充分考虑到施工可能面临的各种情况。对于TBM护盾卡机风险预测问题,数值仿真是一种解决实际工程中缺乏典型卡机实例样本的有效手段。可通过人为设置卡机影响因素的组合,计算不同工况和 卡机风险的数值样本,并将数值样本作为一种“专业 知识”引导机器学习模型进行学习和训练。目前,关于利用数值模拟构建TBM护盾卡机样本的研究仍相对较少。Hasanpour 等使用数值模拟手段构建了不同卡机风险的3600 个样本对贝叶斯网络进行训练。然而,其数值模型中围岩采用弹塑性本构,无法有效考虑围岩的时效蠕变特性,且数值模型中也没有考虑TBM掘进过程(推进速度)等因素的影响。为此,Hou等提出了基于数值样本引导学习的TBM卡机风险预测方法,通过考虑7个卡机影响因素,计算3万多个不同卡机风险等级的数值样本作为“知识”引导RF模型进行学习和训练,解决了工程中缺乏典型卡机实例样本的问题。对于基于数值样本引导学习的TBM卡机风险预测方法,在数值样本中仅考虑了推进速度、超挖量、弹性模量、围岩强度、地应力、TBM最大推进力和摩擦因 数7个影响因素。然而,TBM护盾卡机涉及影响因素众多,如隧道(洞)洞径、TBM 长度、回填层的回填距离、特殊地质条件等因素未在模型中进行考虑,有待在后续研究中进一步完善。此外,该方法对新工程(包括不同工况和设备)的适用性也有待在后续研究中进行检验。
4 TBM掘进参数辅助决策
目前,在TBM掘进施工过程中,TBM驾驶员通常根据试掘进段(即TBM掘进循环中的参数上升段)的数据分析当前设备的运行状况,结合施工经验设置适应当前围岩条件的掘进控制参数。随着TBM施工经验的不断积累和对TBM掘进破岩过程中岩-机相互作用机制的深入了解,国内的TBM制造厂商和施工专家 已经总结出一套相对完整的掘进控制专家经验。但由于TBM驾驶员水平的参差不齐、不同工程间的差 异性,以及需要在掘进过程中对围岩分类准确判断等 原因,经验方法在实际工程应用中仍存在一定的局限性。故TBM 驾驶员在实际施工中通常采取相对“保守的掘进控制方式,导致在很多情况下TBM以次优或较差的控制参数掘进破岩。因此,有必要开展TBM掘进控制参数优化的研究工作,从而为TBM驾驶员调控掘进参数提供辅助决策,在保证TBM施工安全的同时,提高掘进效率,降低施工成本。TBM掘进参数辅助决策主要包括2种方法:1)掘进参数的预测;2)掘进控制参数的优化。
4.1 TBM掘进参数预测研究现状
对TBM掘进参数预测的研究起步较早,预测模型可以分为理论预测模型、经验预测模型和智能预测模型3类。其中,理论预测模型通过室内试验或力学分析研究刀盘滚刀与岩体间的相互作用,从而建立岩体条件参数和TBM性能参数间的关系。 较为经典的理论预测模型是基于室内滚刀线性切割试验得出的CSM模型,得到了众多学者的应用和拓展研究。Yagiz在CSM模型中引入岩体断裂指数和脆性指 数,并基于此构建了TBM推进速度的回归预测模型;周思阳等对TBM破岩过程的刀盘推力进行力学分析和计算推导,并基于此构建了TBM总推进力的预测模型。经验预测模型是基于不同的统计分析手段对历史施工实例进行分析,从而构建围岩和地质条件与TBM性能参数间的经验关系。Hassanpour等基于回归分析建立了IFP 与地质条件参数(如单轴抗压强度、节理间距和岩石质量指标值)间的统计关系式; Bruland通过统计分析方法建立了围岩条件与TBM 推进速度、利用率、滚刀磨损之间的关系。对于TBM掘进参数的辅助决策,主要指的是上述3类模型中的智能预测模型。TBM掘进参数的预测即利用隧道(洞)工程中TBM良好掘进段的历史数据对机器学习模型进行训练(即学习数据中蕴含TBM 驾驶员丰富的操作经验);对于新施工段,可基于预训练好的模型预测TBM的掘进性能参数或直接给出TBM掘进控制参数的合理(或较优)值,为TBM驾驶员评估设备运行状态和调整掘进控制参数提供 指导和依据。侯少康等建立了IPSO-BP 预测模型,利用TBM掘进循环参数上升段前30s的5个掘进参数变化特征(均值和线性拟合斜率)和3个地 质参数作为模型数据,实现了对稳定段推进速度、总推进力和刀盘转矩的预测,基于IPSO-BP 的刀盘转矩和总推进力预测结果如图13所示;Gao等使用3种递归神经网络实现对TBM刀盘转矩、推进速度、推进力等参数的预测,可指导TBM驾驶员进行掘 进参数的适应性调整;曹晋镨等采用长短期记忆网络(LSTM)建立了TBM 稳定推力和转矩的预测模型,并研究了围岩等级信息的输入与否对模型预 测精度的影响;Xu等评估了7种不同的机器学习模型对TBM推进速度、刀盘转速、总推进力和刀盘转矩4个参数的预测效果。
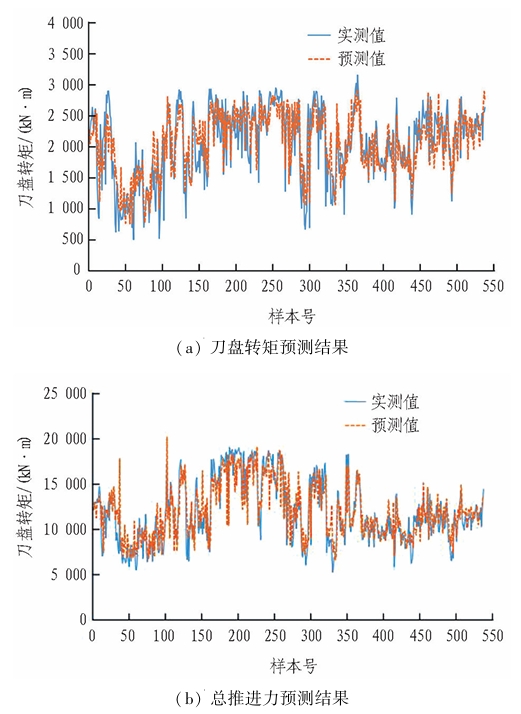
图13 基于IPSO-BP的刀盘转矩和总推进力预测结果
TBM掘进参数的预测依赖于不同地质条件下充足且质量良好的历史掘进数据,并基于此训练机器学习模型直接预测得到较优的控制参数,或者预测出TBM的性能参数响应为驾驶员调整控制参数提供参考。历史数据反映了经验丰富的TBM驾驶员操作行为,而考虑到人为操作的主观性和保守性,通过该方法 预测得到的控制参数组合通常是当前地质条件下的一种合理解而非最优解。故进行TBM掘进参数的优化 研究仍具有较大的必要性。
4.2 TBM掘进参数优化研究现状
TBM掘进参数优化指在已知围岩条件下,通过设置具体的决策策略或采用优化算法在决策变量的可行域范围内寻找控制参数取值的最优组合,实现既定的一个或多个优化目标。TBM掘进控制参数优化的相关研究成果总结如表7所示。
4.2.1 单目标优化
单目标优化方面,王超基于非线性支持向量回归(NSVR)建立TBM掘进载荷预测模型,并结合改进PSO算法,分别决策出以最小化比能和最大化掘进速度为优化目标的最优控制参数结果; 梁军博首先分别建立了基于GBDT的围岩分类预测模型和基于神经网络与随机森林集成的推进速度预测模型,然后以最大化推进速度为优化目标,分别通过穷举法、粒子 群算法和遗传算法求解出最优的TBM控制参数组合。
表7 TBM掘进控制参数优化相关研究成果总结
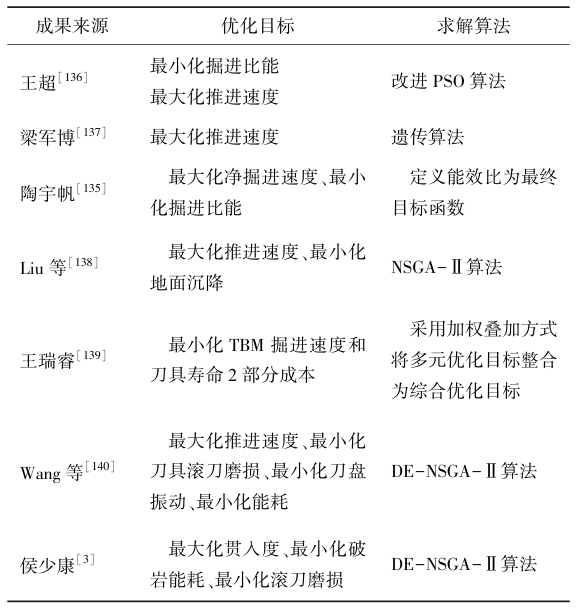
4.2.2 多目标优化
多目标优化方面,陶宇帆在构建的掘进参数预测模型的基础上,以最大化掘进速度和最小化掘进比能为目标提出了能效比指标,并通过寻找约束条件范围内的最大能效比得到最优控制参数(即n和Pr) 的取值组合; Liu等基于灰狼算法优化广义神经网络(GWO-GRNN)构建推进速度和地面沉降预测模型,然后以最大化推进速度和最小化地面沉降为优化目标构建多目标优化数学表达,并通过NSGA-Ⅱ算法 求解Pareto最优前沿,最后通过合理范围限界和加权和法决策出最优解;王瑞睿通过试验和数值模拟得到TBM掘进相关指标的约束可行域,并以最小化掘 进速度和刀具寿命2部分成本为优化目标,构建了TBM控制参数的优化决策方法,基于最低施工成本的TBM控制参数优化结果如图14所示; Wang等基于聚类分析将工程现场的岩体条件分为3类,并根据不同岩体类别下TBM掘进参数的取值范围设置各决策变量的可行域,然后以最大化推进速度、最小化滚刀磨损、最小化刀盘振动和最小化能耗为优化目标,基于多目标差分进化算法求解了最优控制参数组合;候少康等考虑贯入度、破岩能耗和滚刀磨损3个优化目标,构建了TBM掘进控制参数的多目标优化框架及相应数学表达,采用DE-NSGA-Ⅱ算法求解Pareto最优前沿,并提出平衡安全和效率的满意解确定准则,即在Ⅰ—Ⅲ类围岩下侧重掘进效率(取90%分位贯入度处的Pareto 解),在Ⅳ和Ⅴ类围岩下侧重施工安全(取80%分位贯入度处的Pareto解),某TBM掘进实例的Pareto最优前沿解如图15所示。图中f1、f2和f3分别表示贯入度的倒数、破岩能耗和滚刀磨损3个优化目标。

图14 基于最低施工成本的TBM控制参数优化结果
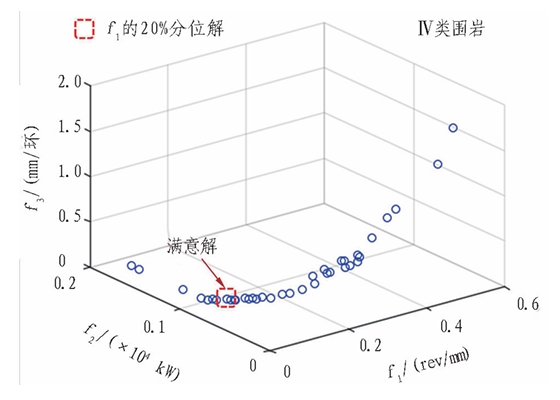
图15 某TBM掘进实例的Pareto最优前沿解
目前,针对TBM掘进参数的单目标优化研究相对较多,主要围绕最大化掘进效率(即推进速度最大或工期最短)或者最小化破岩能耗2类优化目标构造多目标优化问题,并提出相应的最优解求解方法。而对于综合考虑多个目标(如掘进效率、施工成本、能耗等)的多目标优化研究相对较少,已有成果多为近3年开展的研究工作,仍处于探索阶段。TBM掘进参数的优化对历史数据的依赖性较低,难点主要在于构建合适的约束条件(即可行域)、目标函数以及确定各目标的合理权重占比等方面。针对具体的围岩和地质条件,综合考虑不同优化目标实现对TBM掘进参 数的多目标优化决策,仍将是TBM智能施工领域的一个研究重点。
5 TBM智能施工研究展望
5.1 多源数据互补信息的利用
地下工程问题往往较为复杂,以往工程问题中的机器学习模型通常只考虑了单一或较少的数据源,未充分利用可监测多源数据的互补信息提高模型的泛化性能。 例如:对于本文的地质灾害预测预警,仅依靠TBM运行数据通常是不够的,可通过结合更多的监测手段(如超前地质预报等)辅助进行灾害风险的判断。一些学者以TBM出渣图形为对象进行研究,通过 特征提取或图像智能分类,实现了对围岩性质或类别的划分。故对于本文中的围岩分类预测,可以考虑结合TBM出渣的图像等信息提高分类的准确性。综上所述,有必要采用多源数据融合驱动方法,并 重点关注多模态异构数据特征融合方法、数据缺失或 稀疏区域的处理方式、多源数据特征的权重调节机制等方面。
5.2 专业机制知识-数据的融合驱动
机器学习等人工智能模型的训练通常需要足量且具有代表性的数据样本,目前构建的机器学习“黑箱”模型主要依赖于历史数据,当数据不全面时容易造成预测的不合理,对于取值域外数据的预测效果较差,且缺乏可解释性。目前对于数据与先验专业机制的融合驱动研究仍有待形成系统可靠的方法体系。陈祖煜等基于吉林引松工程和内蒙古引绰济辽工程,介绍了知识驱动方法和数据驱动方法在TBM智能施工机器学习中的应用,分析了知识驱动的优势和特点,在数据的数量和质量不够完善时,知识驱动可能具有更优的预 测效果。对于专业机制知识与数据融合驱动方面,一些学者提出了类似3种融合模式(或融合模型),可概括为:知识启发(串联模型)、知识约束(并联模型)和 知识启发-约束混合(混合模型)。马睿等通过混凝土拱坝温度场的预测实例,验证了专业机制知识与数据融合驱动的优势,相较于单纯的数据驱动模型具有更准确、合理的预测结果;专业机制知识与数据融合驱动的3种基本模型如图16所示。后续工作中应更深入地研究专业机制知识与数据驱动模型的融合方式或作用模式,以及通过多个工程 应用验证其有效性及适用性。
5.3 新工程/工况应用场景的迁移学习
工程问题往往具有较强的复杂性和不确定性,同时,机器学习模型建立的前提是样本独立同分布的假设。因此,根据已有工程数据训练好的模型在很多情况下对新工程和新工况的适用性较差。一方面,由于岩体工程的复杂性和不同工程间的差异性,训练好的预测模型难以直接应用于新工程;另一方面,新工程的建设初期,数据样本较少,无法用于训练高精度预测模型。例如:对于灾害预测问题,典型的标签样本较少,难以直接训练获得高精度的学习模型。一些学者已经意识到基于历史数据建立模型对新工程应用的局限性,并开展了相应的探索及分析研究。迁移学习即利用具有“丰富”的历史数据样本开展机器学习, 通过特定的迁移学习策略(如实例迁移、特征迁移和 参数迁移)使得辅助域上的预训练模型可有效地应用 于新工程,这也是该领域应关注的一个研究重点。
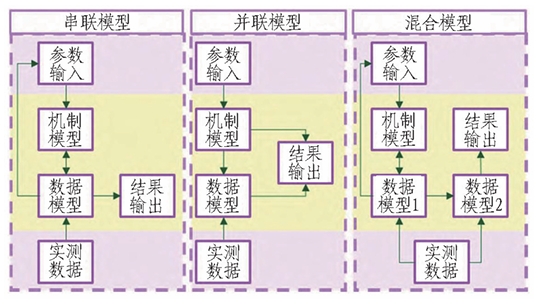
图16 专业机制知识与数据融合驱动的3种基本模型
6 结论与展望
1)TBM掘进循环可划分为启动段、空推段、参数 上升段、稳定段和停机段5个工作阶段。其中,参数上升段和稳定段为有效破岩阶段,为开展TBM数据机器 学习的基础。所提出标准化的TBM运行数据预处理方法应建立在配套的TBM施工规范化操作流程基 础上。
2)TBM掘进过程的围岩智能感知方法主要包括无监督学习(聚类分析)和监督学习(神经网络、支持向量机、决策树、集成学习等)2种。为实现更好的工程应用,后续仍需从模型角度构建更加精确的预测模型;并从数据角度引入多源数据或更多其他工程数据为模型提供更多的可解释信息,以及开展不平衡数据集的应对策略研究。
3)TBM掘进过程的塌方预测预警一方面是基于现场施工情况和地质条件数据构建分析模型(如贝叶斯网络)或预测模型;另一方面是基于“正常”掘进数据训练TBM运行参数或综合特征指标预测模型,并根据塌方段的预测精度下降等现象构建预警指标。后续仍需结合多工程实例开展深化研究,并研究超前地质预报等多源数据的融合利用方法。
4)TBM掘进过程的卡机风险可通过将卡机影响因素输入贝叶斯网络或分类器进行直接预测,也可通过先预测围岩挤压力或收敛变形,进而进行间接预测。 一些研究人员提出构建数值样本作为“专业知识”来 进行引导学习的思路,但研究中考虑的影响因素仍不全面,有待进一步完善;且所提方法对于新工程应用场 景的适应性需分析论证。
5)TBM掘进参数预测即利用良好掘进段的历史数据得到预训练模型,并基于此预测新施工段的掘进性能参数或直接预测掘进控制参数,但通常为合理解而非最优解;而TBM掘进参数优化即通过构建单目标 或多目标优化问题,并在可行域范围内求解控制参数的最优组合。后续工作应聚焦于约束条件、目标函数,各目标权重设置等方面。
6)TBM智能施工的后续研究可重点利用多源数据互补信息增强预测模型的泛化性能,通过专业知识机制和数据的融合驱动来提高预测结果的合理性,采用有效的迁移学习方法来提高预训练模型对新工程/工况应用场景的适用性。